|
Abstract. |
Ground Surface Reconstruction Using On-Vehicle Cameras
Abstract
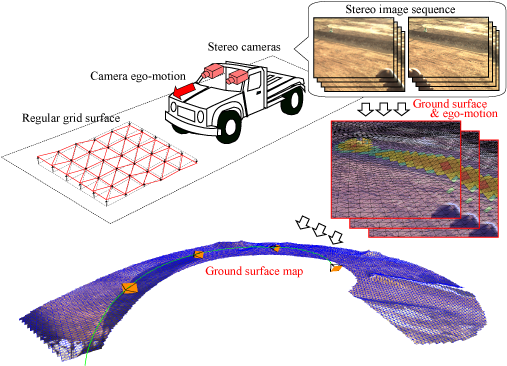
We propose a robust method for incrementally estimating a regular-grid ground surface map from stereo image sequences captured by nearly front-looking vehicle-mounted stereo cameras. The method simultaneously estimates a camera ego-motion and vertex heights of a regular mesh, which is composed of piecewise triangular patches drawn on a level plane in the ground coordinate system, by minimizing pixel value differences over the ground surface. The method combinationally uses feature-based approach and pixel-based approach for robustly estimating ego-motion parameters. We also show that this combination is beneficial for removing outlier pixels, which mainly represent the edge of the self-shadow area on the ground surface. The validity of the proposed method has been demonstrated through experiments using real images.
|
Abstract. |
Publications
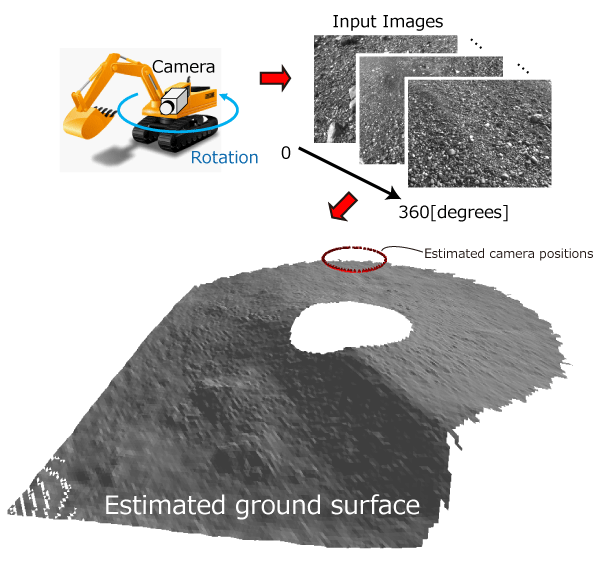
360-Degree 3D Ground Surface Reconstruction Using a Single Rotating Camera
360-Degree 3D Ground Surface Reconstruction Using a Single Rotating Camera
Kouma Motooka, Shigeki Sugimoto, Masatoshi Okutomi and Takeshi Shima
Proceedings of 7th Workshop on Planning, Perception and Navigation for Intelligent Vehicles (PPNIV2015), September, 2015 (発表予定)
回転するカメラを用いた高精度地表3Dサーフェス推定
本岡昂馬, 杉本茂樹, Doan Phuc Phan, 奥富正敏, 志磨健
第21回画像センシングシンポジウム(SSII2015), June, 2015
Ground Surface Reconstruction Using On-Vehicle Cameras
車載ステレオカメラを用いたロバストな3D地表サーフェスマップ生成
杉本茂樹, 本岡昂馬, 奥富正敏, 志磨健
電子情報通信学会論文誌D, Vol.J98-D, No.4, pp.627-638, April, 2015
Robust Ground Surface Map Generation Using Vehicle-Mounted Stereo Camera
Kouma Motooka, Shigeki Sugimoto, Masatoshi Okutomi and Takeshi Shima
Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS2014), pp.2741-2748, September, 2014
車載ステレオカメラを用いたロバストな地表面サーフェスマップ生成
本岡昂馬, 杉本茂樹, 奥富正敏, 志磨健
第20回画像センシングシンポジウム(SSII2014), pp.IS3-16-1-8, June, 2014
Direct Generation of Regular-Grid Ground Surface Map From In-Vehicle Stereo Image Sequences
Shigeki Sugimoto, Kouma Motooka and Masatoshi Okutomi
Proceedings of the 4th Workshop on Computer Vision in Vehicle Technology: From Earth to Mars (CCVT2013:E2M), pp.600-607, December, 2013
Direct Ground Surface Reconstruction from Stereo Images
Shigeki Sugimoto, Takaaki Kato, Kouma Motooka and Masatoshi Okutomi
IPSJ Transactions on Computer Vision and Applications, Vol.5, pp.60-64, July, 2013
Direct Ground Surface Reconstruction from Stereo Images
Shigeki Sugimoto, Takaaki Kato, Kouma Motooka and Masatoshi Okutomi
第16回画像の認識・理解シンポジウム(MIRU2013)論文集, OS4-1, July, 2013
時系列ステレオ画像を用いた直接法による広範囲な地表サーフェスマップ生成
本岡昂馬, 杉本茂樹, 奥富正敏
情報処理学会研究報告(コンピュータビジョンとイメージメディア(CVIM)), Vol.2013-CVIM-187, No.9, pp.1-5, May, 2013