Simple Yet Effective Way to Use Polarimetric Information in Stereo Matching
Jinyu Zhao, Yusuke Monno, Masatoshi Okutomi
Institute of Science Tokyo
International Conference on Machine Vision Applications (MVA 2025)
Abstract
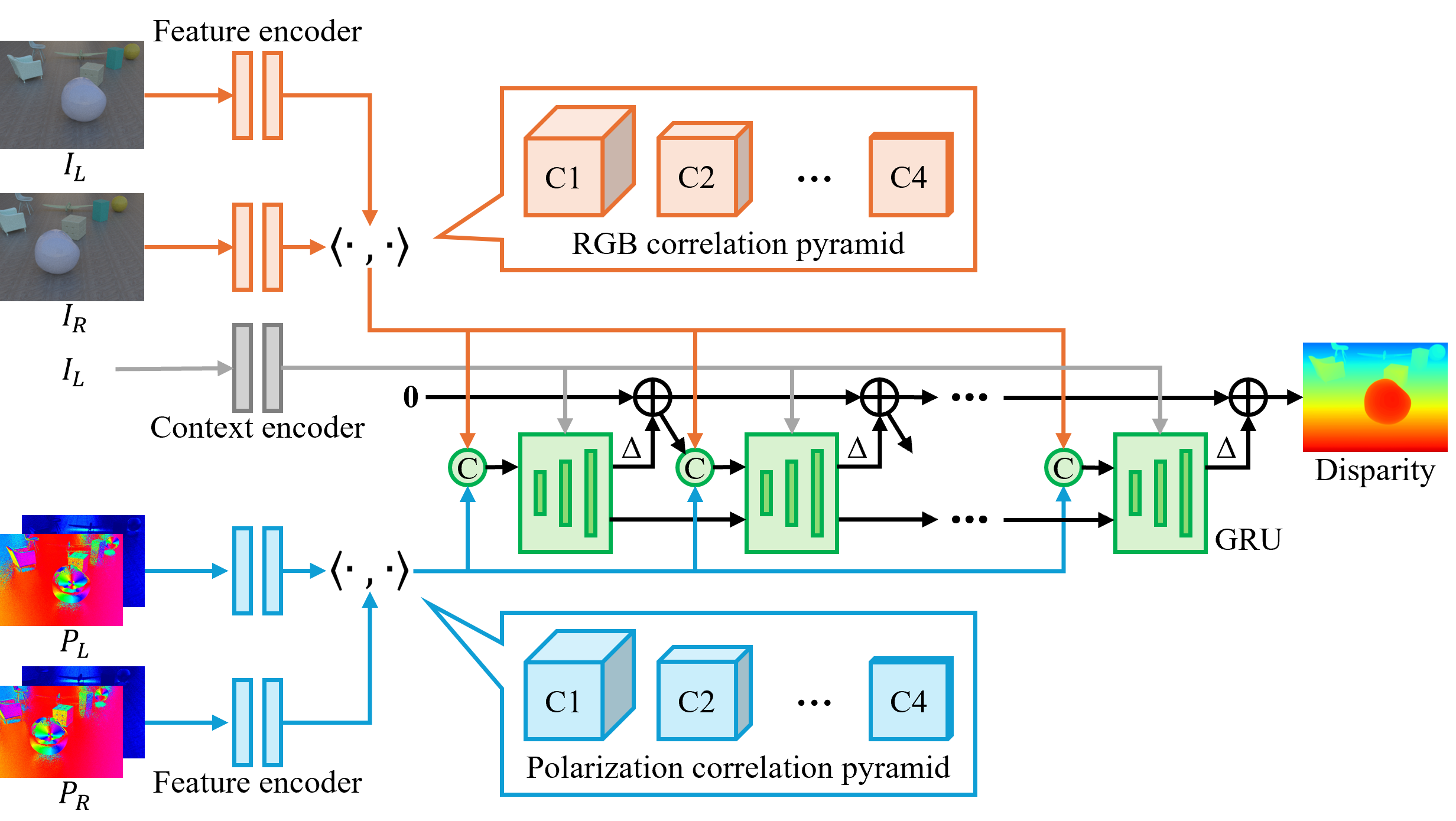
Polarimetric information holds great potential in improving stereo matching due to its strong correlation with scene geometry. One limitation of polarimetric stereo matching research is the lack of an evaluation dataset allowing comprehensive assessment of different ways to use polarimetric information. To address this limitation, in this study, we create a synthetic dataset for polarimetric stereo matching using a physically based renderer and systematically investigate effective ways to use polarimetric information for stereo matching. Based on the investigation, we propose a stereo matching network, featuring a simple yet effective way to use polarimetric information based on Stokes parameters inputs and dual encoders. Experimental results demonstrate that our network achieves state-of-the-art performance, especially showing strong robustness to noise.
Our Results

Download Materials
Paper [PDF]
Code [ZIP]
Dataset [ZIP]
Publication
Simple Yet Effective Way to Use Polarimetric Information in Stereo Matching
Jinyu Zhao, Yusuke Monno, Masatoshi Okutomi
International Conference on Machine Vision Applications (MVA 2025)
Contact
Jinyu Zhao: jzhao[at]ok.sc.e.titech.ac.jp
Yusuke Monno: ymonno[at]ok.sc.e.titech.ac.jp
Masatoshi Okutomi: mxo[at]ctrl.titech.ac.jp