
バイクの検出例
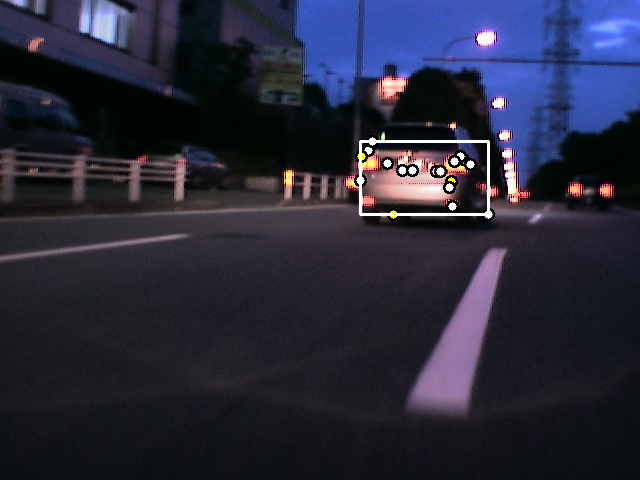
自動車の検出例

歩行者の検出例
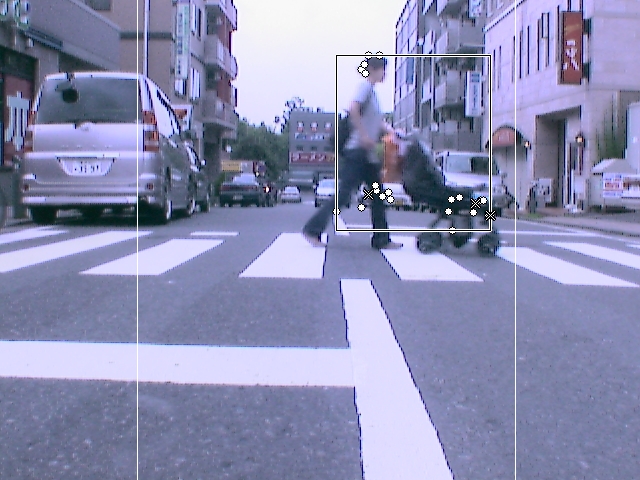
ベビーカーの検出例
|
バイクの検出例 |
自動車の検出例 |
|
歩行者の検出例 |
ベビーカーの検出例 |
| abstract Sensor fusion of millimeter-wave (MMW) radar and a camera is beneficial for advanced driver assistance functions such as obstacle avoidance and Stop&Go. In this paper, we propose a method for detecting a moving obstacle using MMW radar and CCD camera, along with a calibration method for two sensors. Our method is designed for detecting moving obstacles, such as cars, motorcycles, pedestrians, bicycles, and so on in urban areas, observed by a camera mounted on a vehicle. In the proposed method, we detect a moving obstacle by estimating image boundaries which enclose a group of feature points exactly on the obstacle. In order to determine the group, feature points in a whole image are detected at every image frame and tracked over several consecutive frames, and then we apply a motion segmentation technique, so-called subspace factorization, developed in the computer vision domain. For robustness in boundary estimation, we use MMW radar so as to detect the obstacle’s rough position which results in an image region where an obstacle would exist; the motion segmentation technique is applied toward the tracks that drop in the region. Note that an obstacle's position detected by MMW radar is remarkably rough because MMW radar has low directional resolution. Nevertheless, the position contributes to rapid and robust estimation for satisfactory image boundaries. We demonstrate the validity of the proposed method through experiments using sensors that are mounted on a vehicle. |
| このページの先頭へ |