Deep Stereo Matching
Okutomi-Tanaka Lab.
Tokyo Institute of Technology
Introduction of Stereo Matching
Stereo matching is a computer vision technique used to extract depth information from pairs of stereo images. It simulates the human visual system's binocular vision, where depth perception is achieved by comparing the slightly different views captured by two cameras.
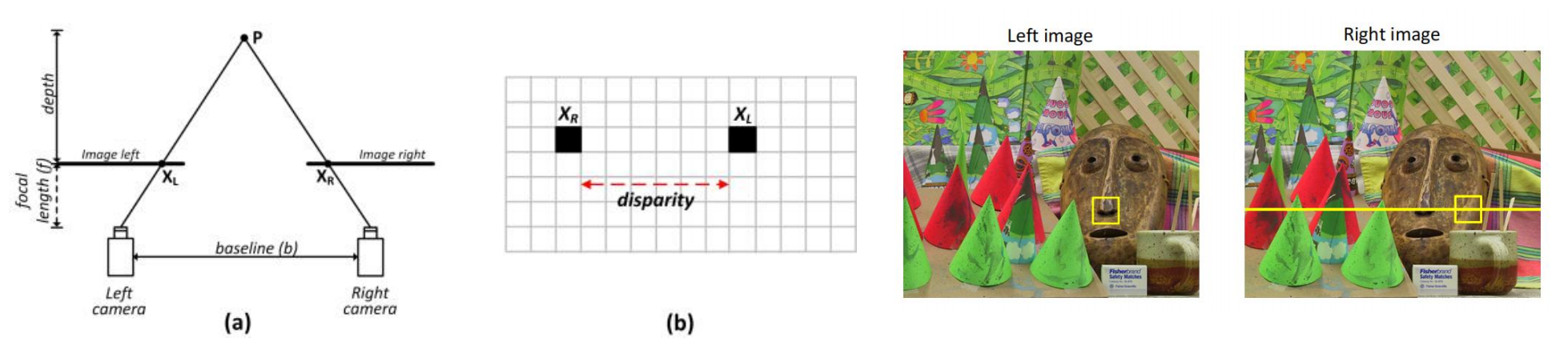
Stereo Matching is to find the corresponding pixels of a left and right image pair, the horizontal displacement of the same pixel in left and right image is called disparity, where depth Z can be estimated by given the camera focal length f and baseline B.
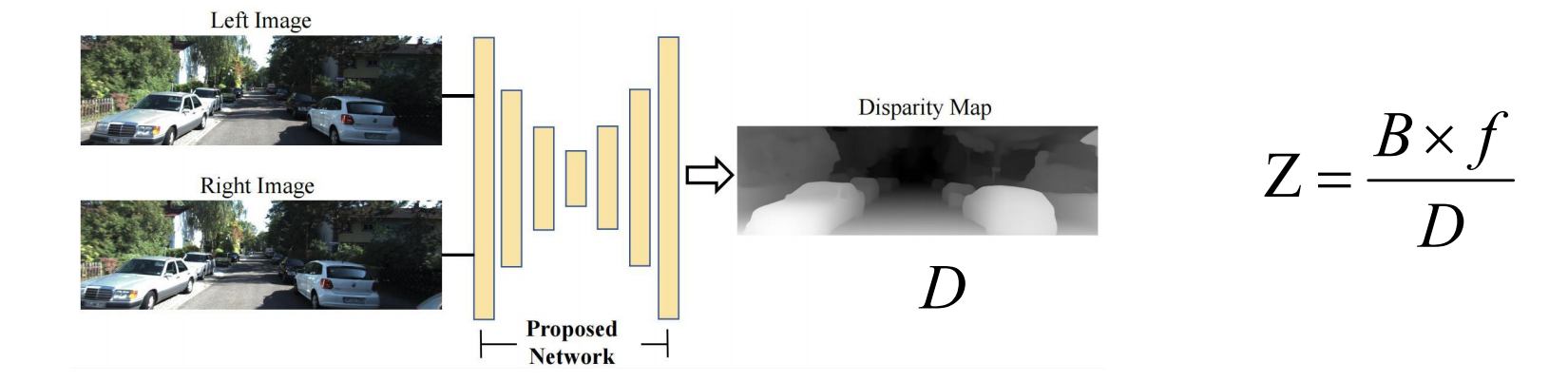
In recent times, the swift advancement of deep learning has notably enhanced the effectiveness of stereo matching algorithms. This project delves into the application of deep learning networks to elevate the performance of stereo matching.
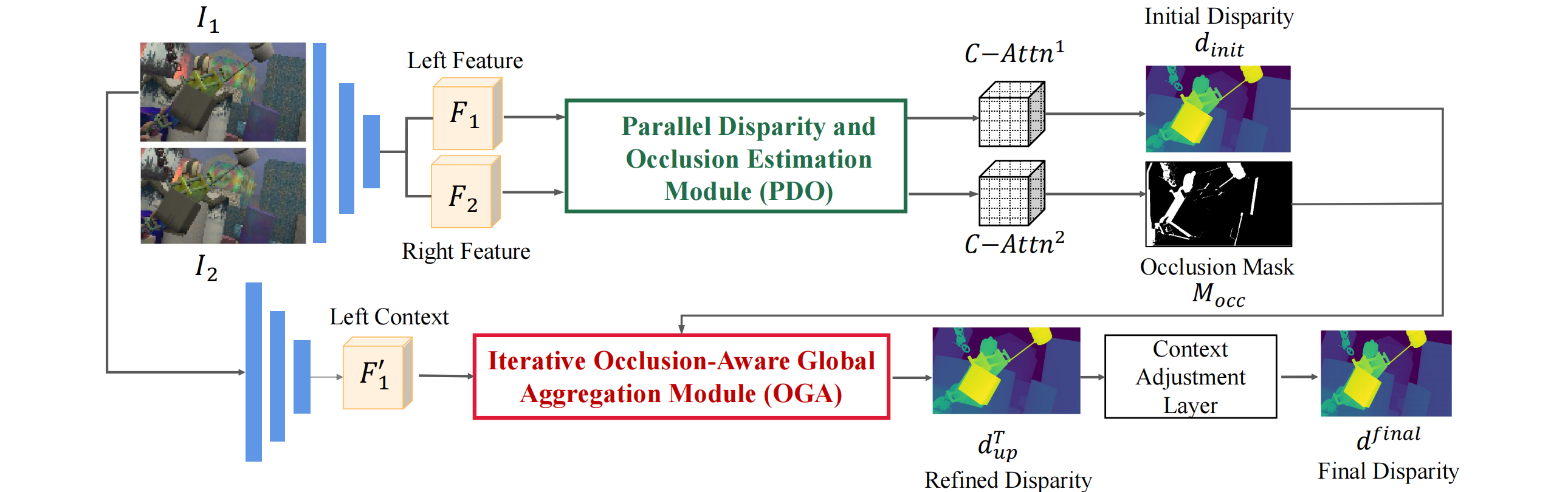
Global Occlusion-Aware Transformer for Robust Stereo Matching. [Project Page]
Publication:
Global Occlusion-Aware Transformer for Robust Stereo Matching.
Zihua Liu, Yizhou Li, Masatoshi Okutomi
Proceedings of IEEE/CVF Winter Conference on Applications of Computer Vision (WACV2024)
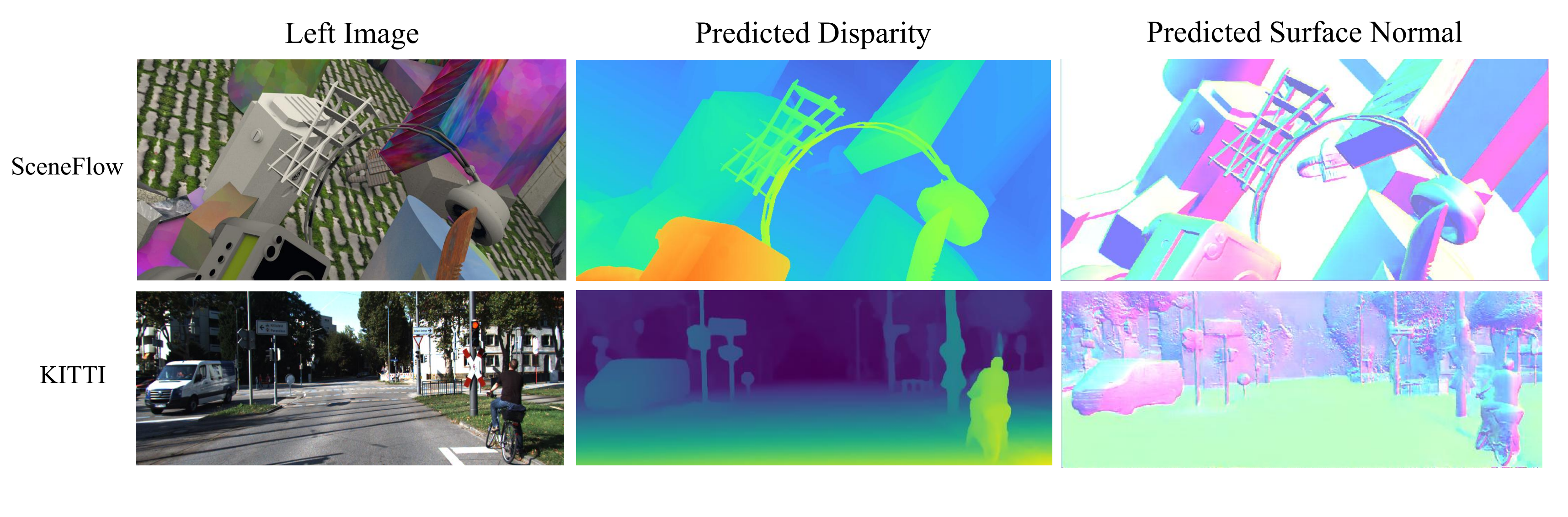
Digging Into Normal Incorporated Stereo Matching. [Project Page]
Publication:
Digging Into Normal Incorporated Stereo Matching
Zihua Liu, Songyan Zhang , Zhicheng Wang , Masatoshi Okutomi
Proceedings of the 30th ACM International Conference on Multimedia (ACMMM2022)
|
|