GastroNVS dataset
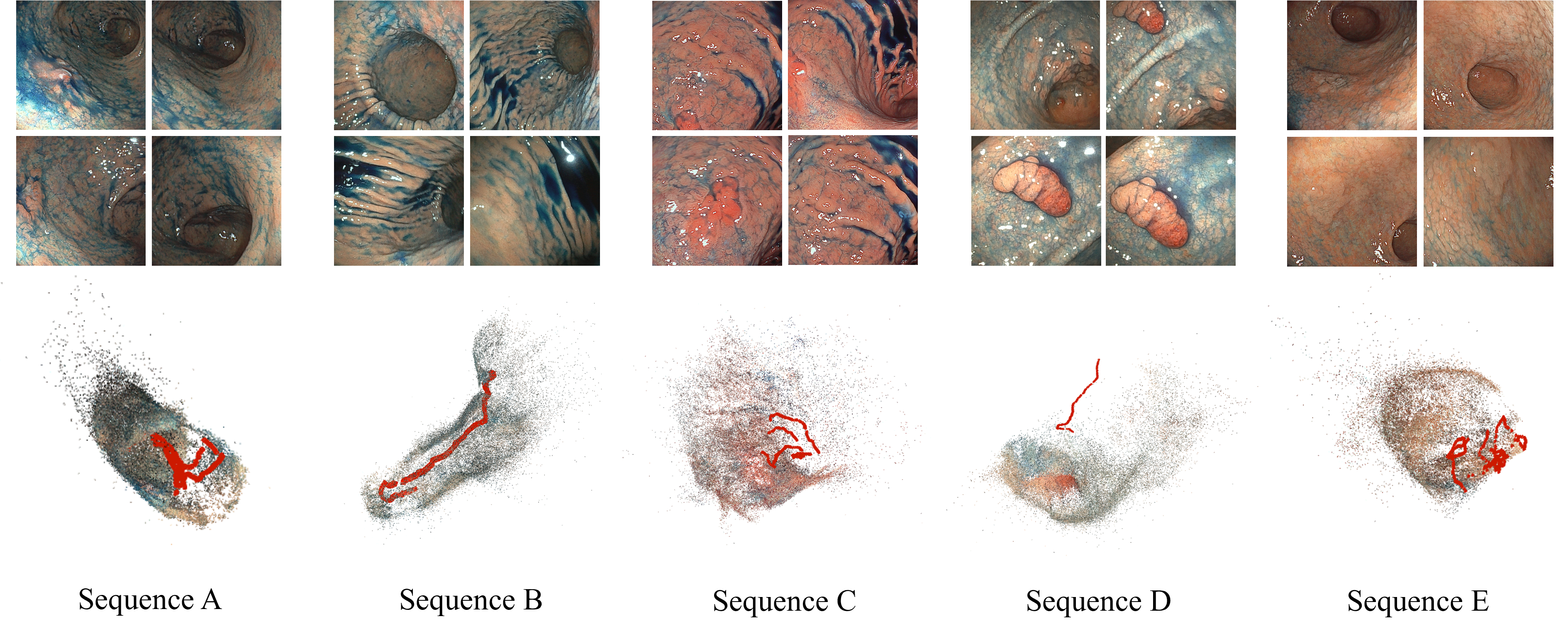
The GastroNVS dataset contains gastroendoscopic image sequences along with their estimated camera poses and the reconstructed 3D point cloud by SfM. The dataset was collected during real gastroendoscopy inspections, which capture the gastric surfaces of real patients with gastric lesions and include relatively large viewpoint changes that occurred in the real inspections. Thus, it provides an evaluation platform for real environments in gastroendoscopy.
