Department of Systems and Control Engineering, School of Engineering,
Tokyo Institute of Technology
IEEE International Conference on Robotics and Automation (ICRA 2022)
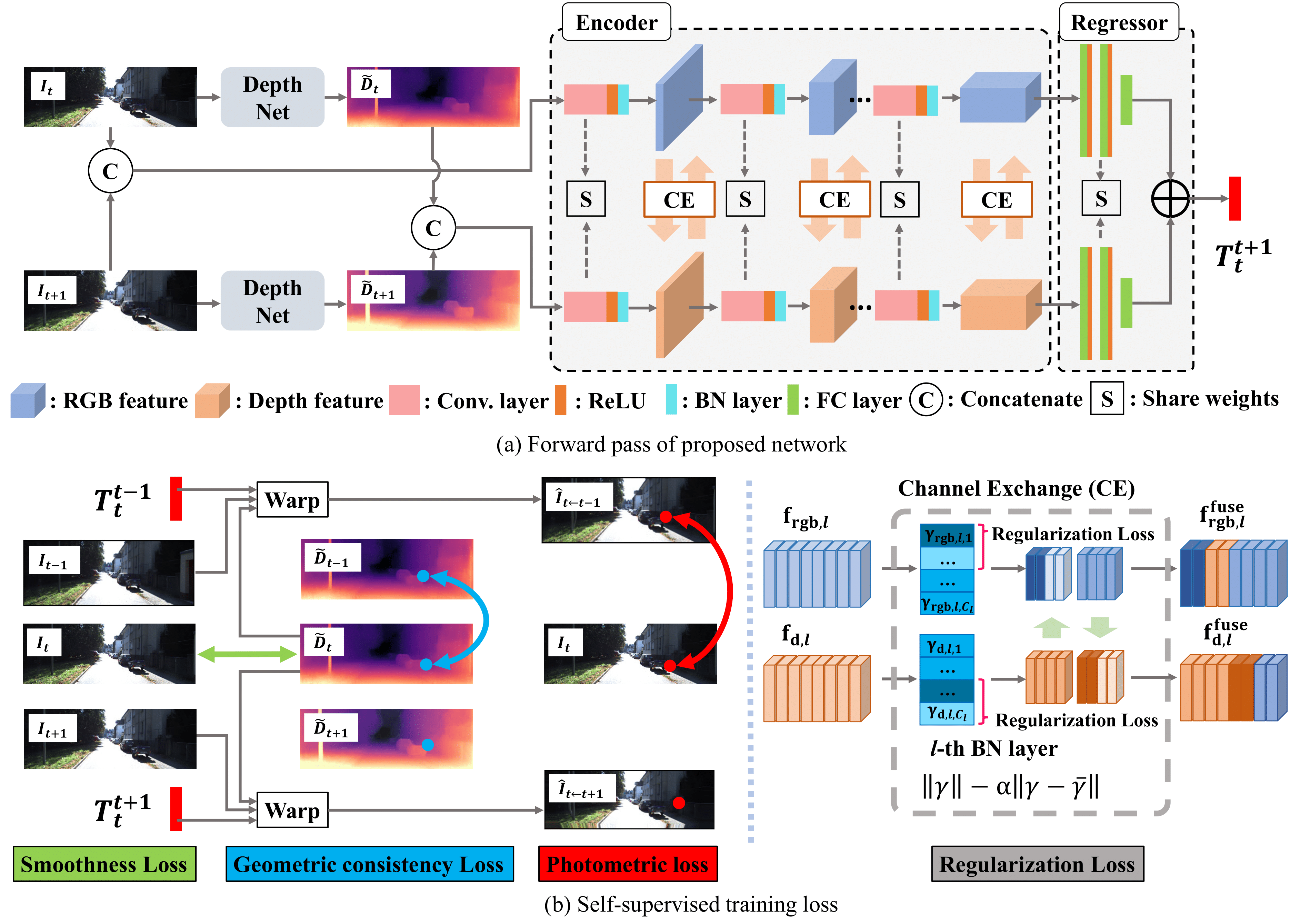
In existing self-supervised depth and ego-motion estimation methods, ego-motion estimation is usually limited to only leveraging RGB information. Recently, several methods have been proposed to further improve the accuracy of selfsupervised ego-motion estimation by fusing information from other modalities, e.g., depth, acceleration, and angular velocity. However, they rarely focus on how different fusion strategies affect performance. In this paper, we investigate the effect of different fusion strategies for ego-motion estimation and propose a new framework for self-supervised learning of depth and ego-motion estimation, which performs ego-motion estimation by leveraging RGB and inferred depth information in a MultiLayer Fusion manner. As a result, we have achieved state-of-theart performance among learning-based methods on the KITTI odometry benchmark. Detailed studies on the design choices of leveraging inferred depth information and fusion strategies have also been carried out, which clearly demonstrate the advantages of our proposed framework3
Zijie Jiang , Hajime Taira , Naoyuki Miyashita and Masatoshi Okutomi, “Self-Supervised Ego-Motion Estimation Based on Multi-Layer Fusion of RGB and Inferred Depth”, Proceedings of the 39th IEEE Conference on Robotics and Automation (ICRA2022), May 2022
This work was partly supported by JSPS KAKENHI Grant Number 17H00744.
Please contact us if you have any qestions/claims: