Department of Systems and Control Engineering, School of Engineering,
Tokyo Institute of Technology
IEEE International Conference on Industrial Technology (ICIT 2021)
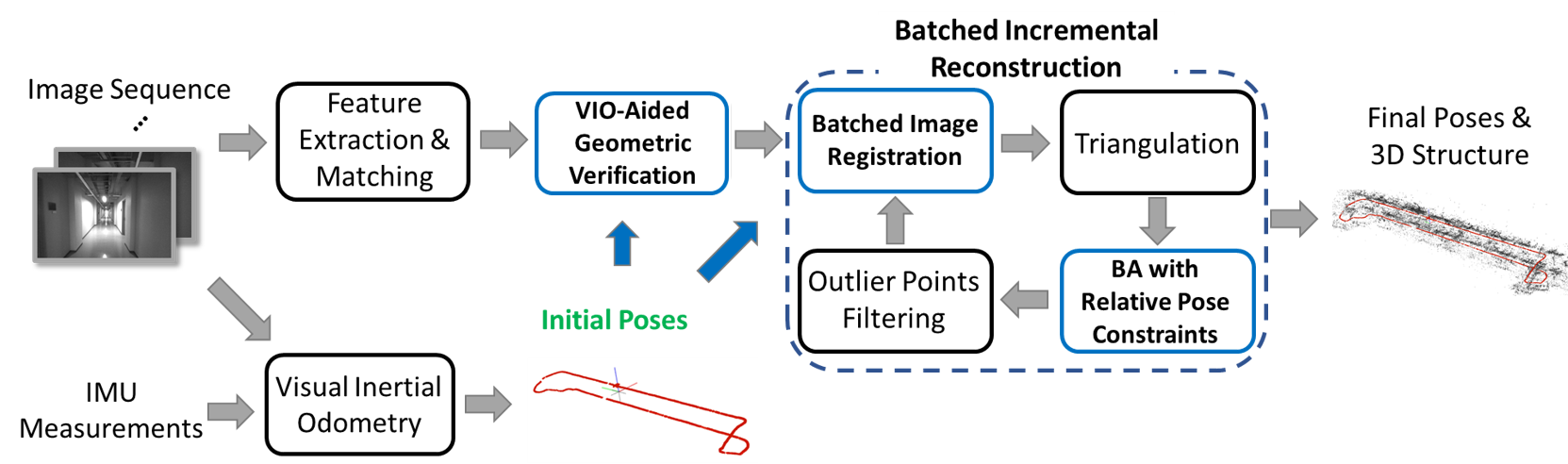
In this paper, we present a robust and efficient Structure from Motion pipeline for accurate 3D reconstruction under challenging environments by leveraging the camera pose information from a visual-inertial odometry. Specifically, we propose a geometric verification method to filter out mismatches by considering the prior geometric configuration of candidate image pairs. Furthermore, we introduce an efficient and scalable reconstruction approach that relies on batched image registration and robust bundle adjustment, both leveraging the reliable local odometry estimation. Extensive experimental results show that our pipeline performs better than the state-of-the-art SfM approaches in terms of reconstruction accuracy and robustness for challenging sequential image collections.
Zijie Jiang , Hajime Taira , Naoyuki Miyashita and Masatoshi Okutomi, “VIO Aided Structure from Motion Under Challenging Environments”, Proceedings of the 22nd IEEE International Conference on Industrial Technology (ICIT2021), March 2021
This work was partly supported by JSPS KAKENHI Grant Number 17H00744.
Please contact us if you have any qestions/claims: