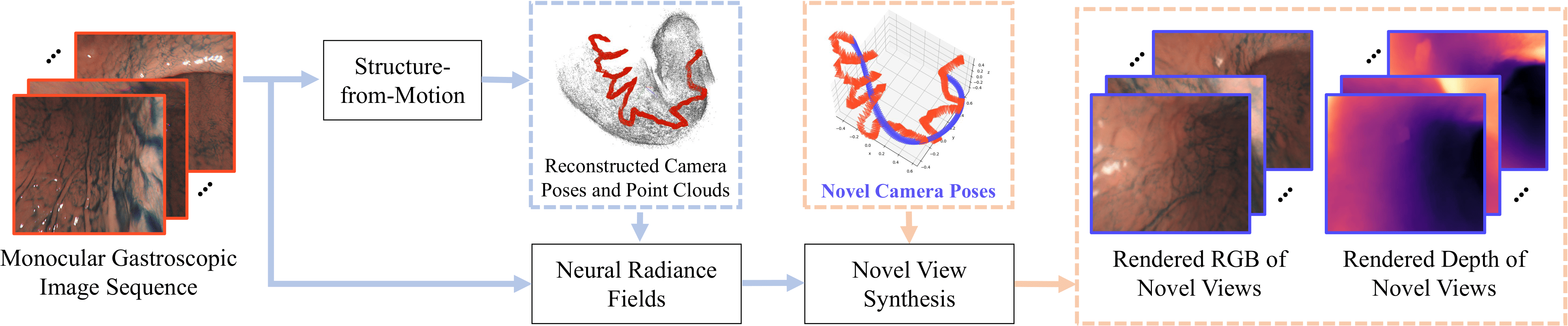
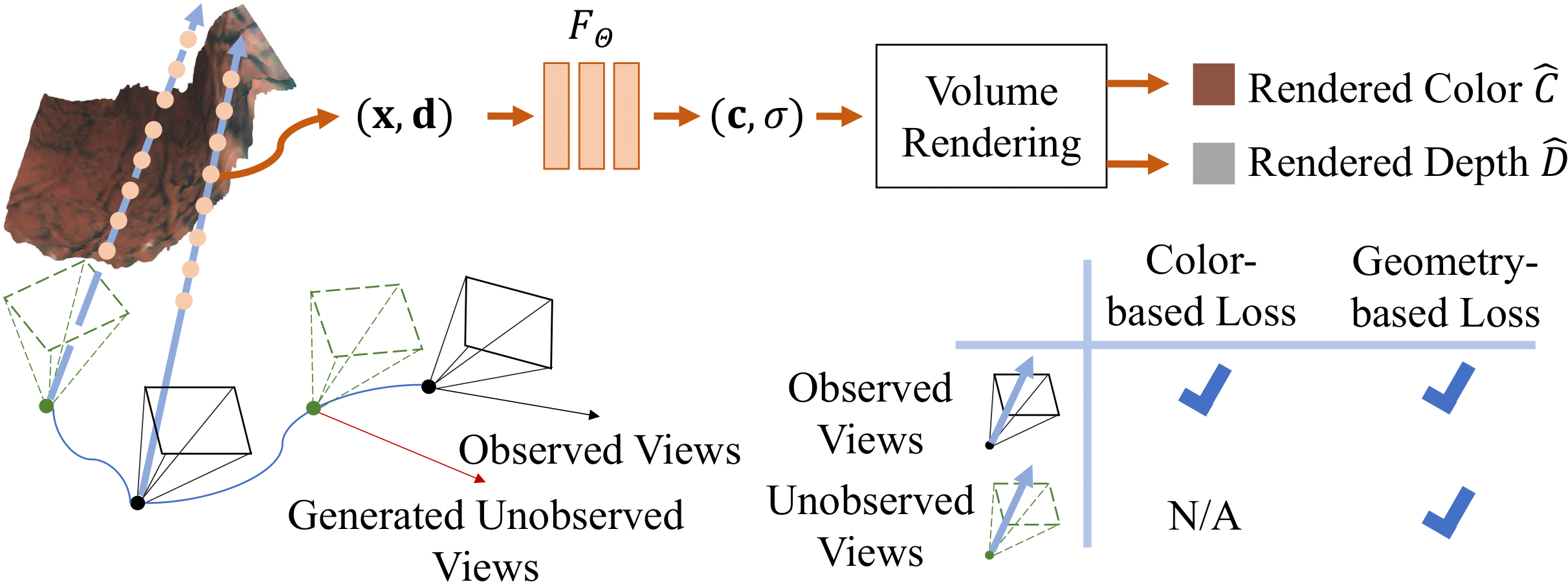
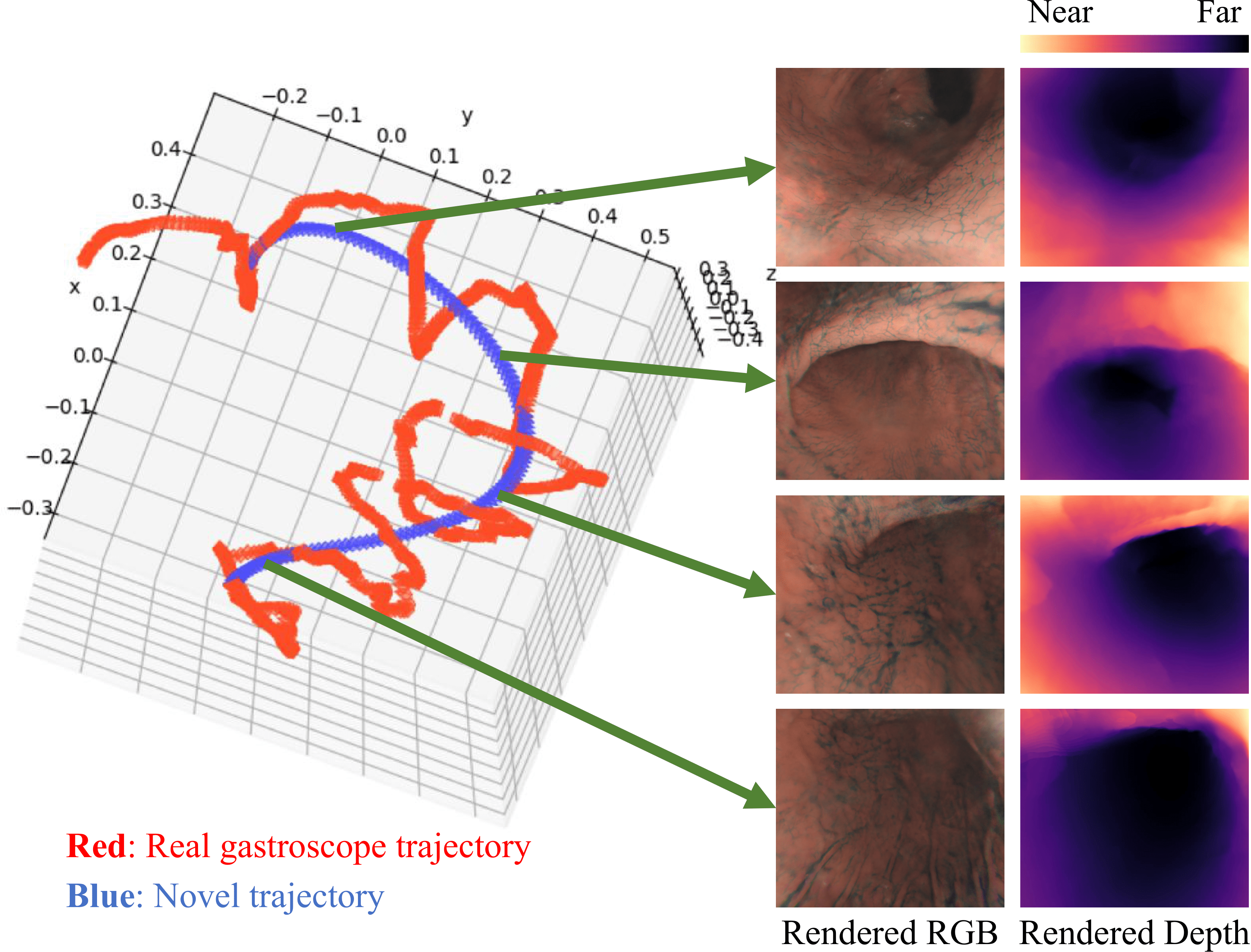
Enabling the synthesis of arbitrarily novel view- point images within a patient's stomach from pre-captured monocular gastroscopic images is a promising topic in stomach diagnosis. Typical methods to achieve this objective integrate traditional 3D reconstruction techniques, including structure- from-motion (SfM) and Poisson surface reconstruction. These methods produce explicit 3D representations, such as point clouds and meshes, thereby enabling the rendering of the images from novel viewpoints. However, the existence of low- texture and non-Lambertian regions within the stomach often results in noisy and incomplete reconstructions of point clouds and meshes, hindering the attainment of high-quality image rendering. In this paper, we apply the emerging technique of neural radiance fields (NeRF) to monocular gastroscopic data for synthesizing photo-realistic images for novel viewpoints. To address the performance degradation due to view sparsity in local regions of monocular gastroscopy, we incorporate geometry priors from a pre-reconstructed point cloud into the training of NeRF, which introduces a novel geometry-based loss to both pre-captured observed views and generated unobserved views. Compared to other recent NeRF methods, our approach showcases high-fidelity image renderings from novel viewpoints within the stomach both qualitatively and quantitatively.