Welcome to Stomach 3D project page
Please select the project that you are interested in more detail:
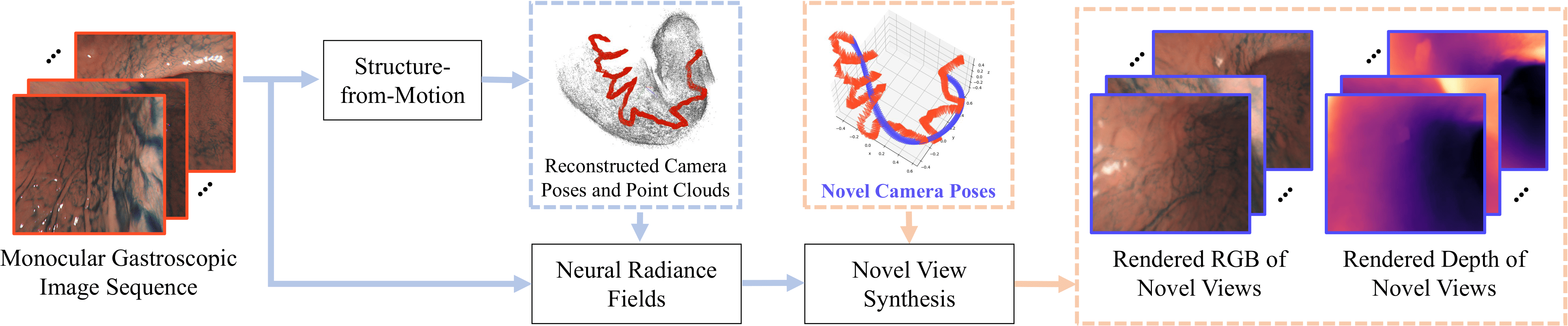
Neural Radiance Fields for Novel View Synthesis in Monocular Gastroscopy
IEEE EMBC 2024
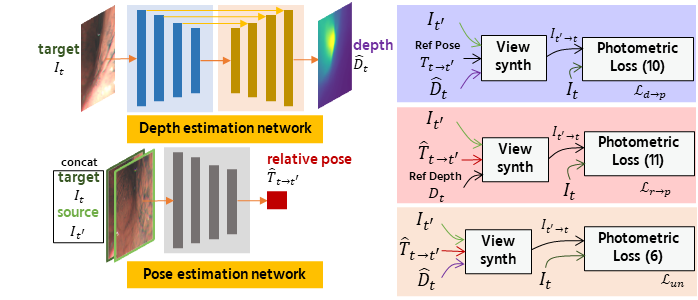
Learning-Based Depth and Pose Estimation for Monocular Endoscope with Loss Generalization
IEEE EMBC 2021
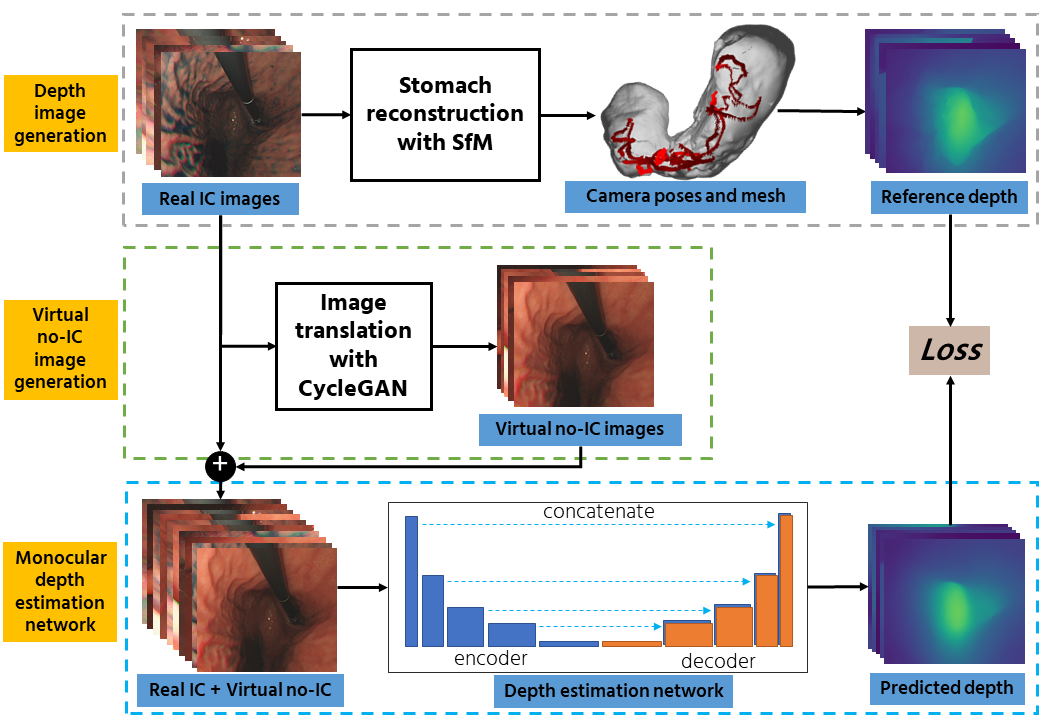
Self-Supervised Monocular Depth Estimation in Gastroendoscopy Using GAN-Augmented Images
SPIE Medical Imaging 2021
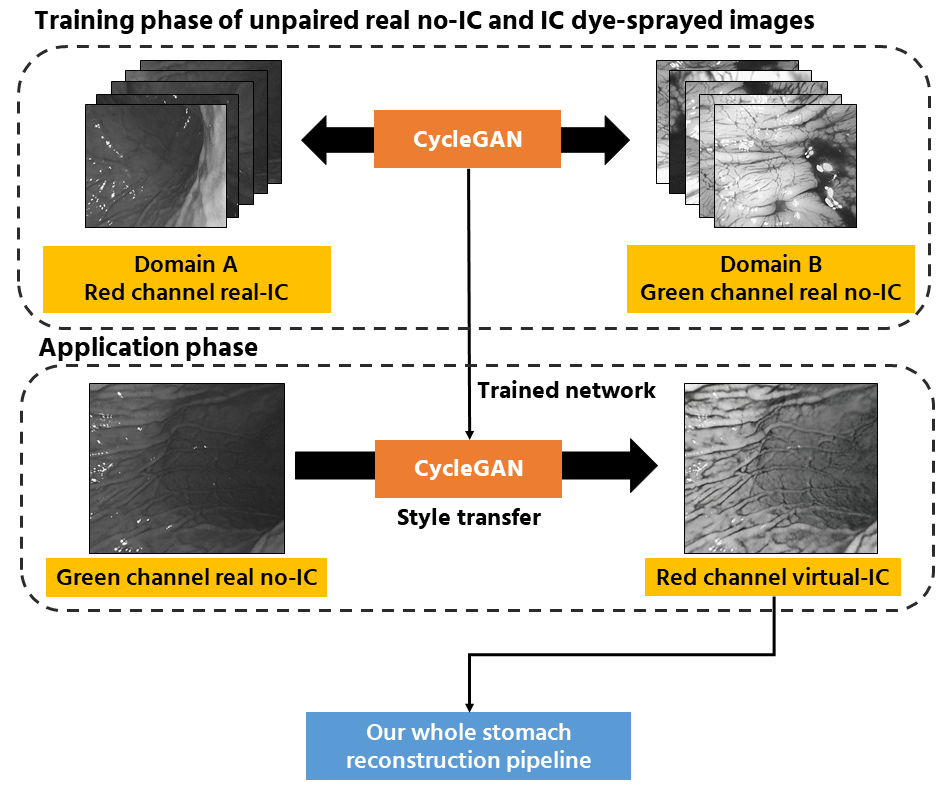
Stomach 3D Reconstruction Based on Virtual Chromoendoscopic Image Generation
IEEE JTEHM 2021
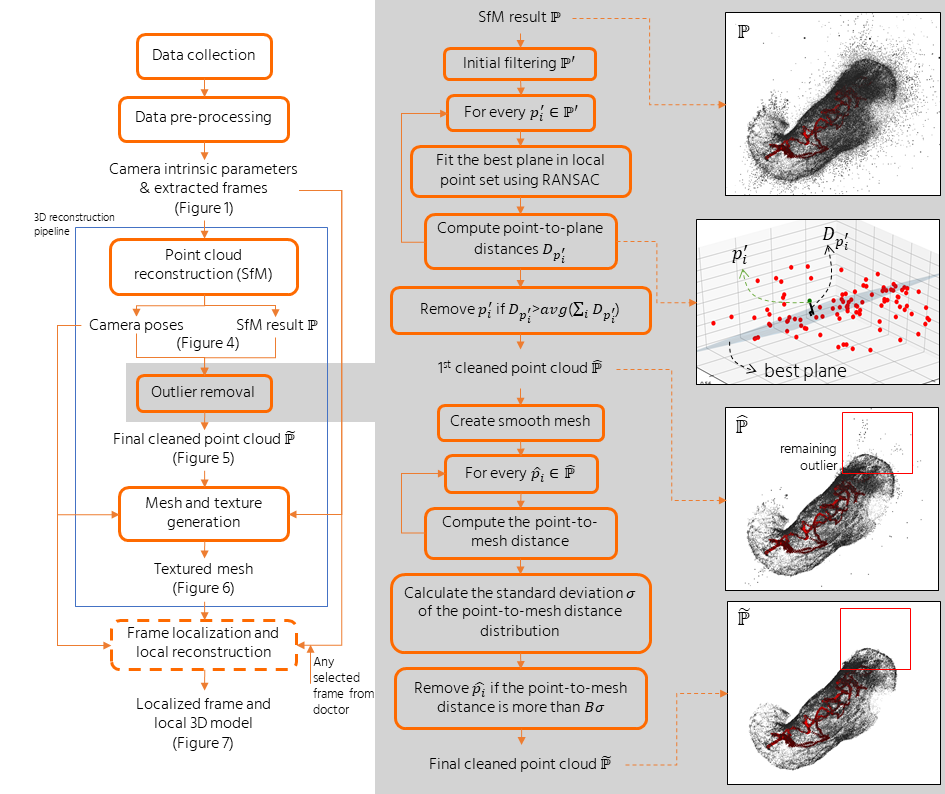
Whole Stomach 3D Reconstruction and Frame Localization from Monocular Endoscope Video
IEEE JTEHM 2019