Dept. of Systems and Control Engineering
Institute of Science Tokyo
Institute of Science Tokyo Library
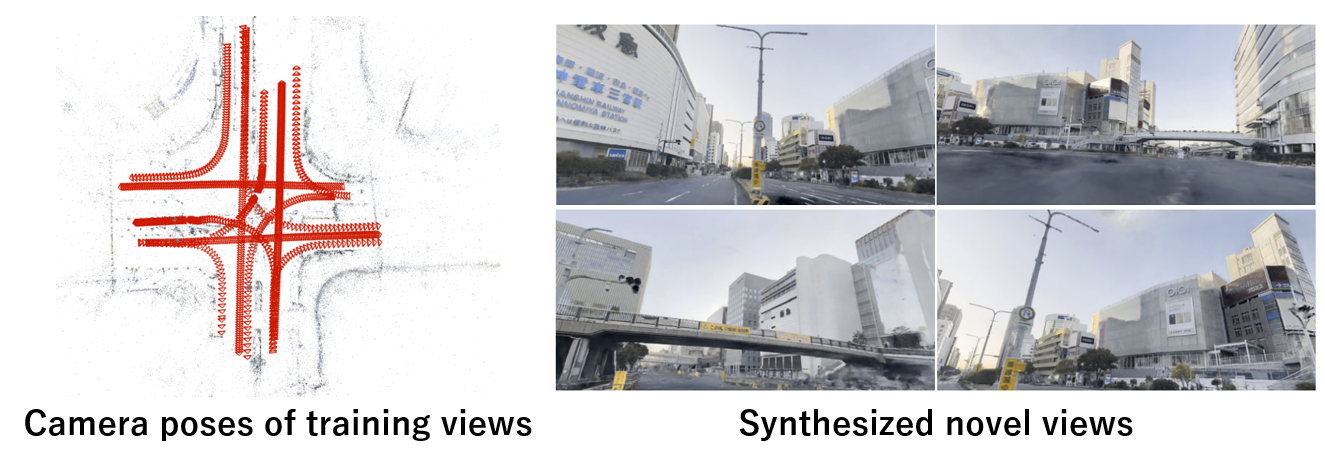
Novel Street-View Synthesis Using Car-Mounted Camera
ICIP2026, VISAPP2025
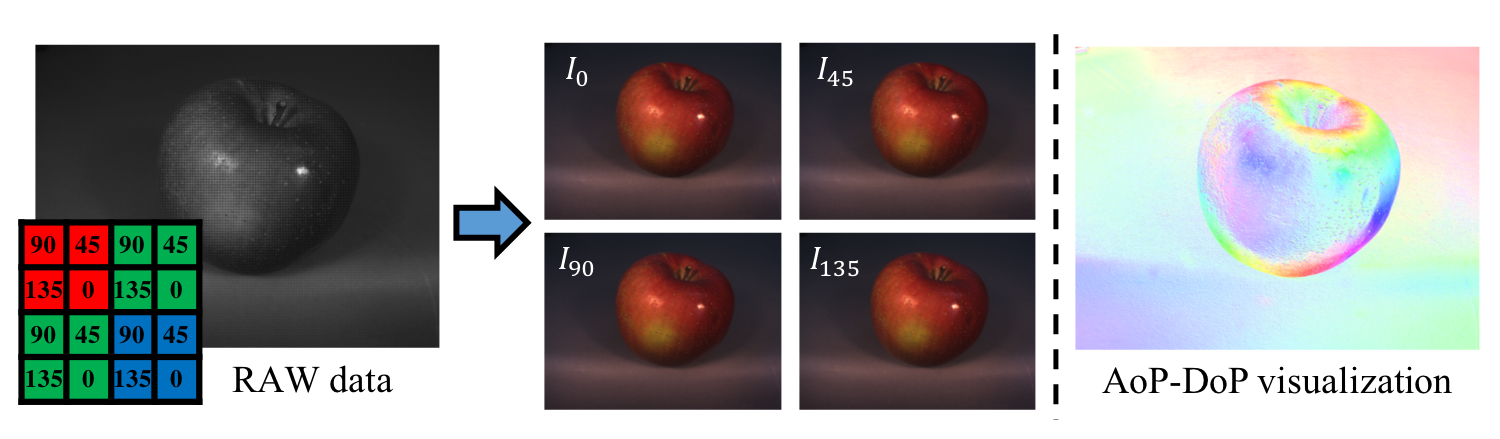
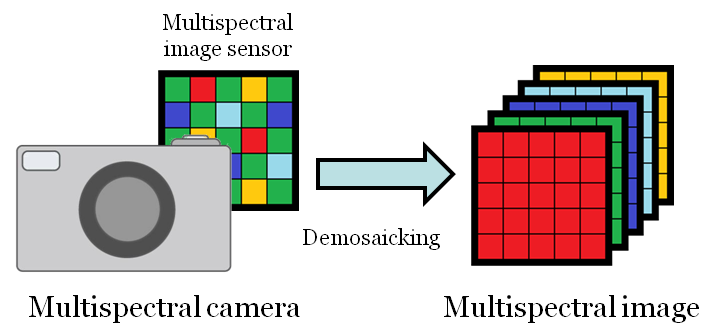
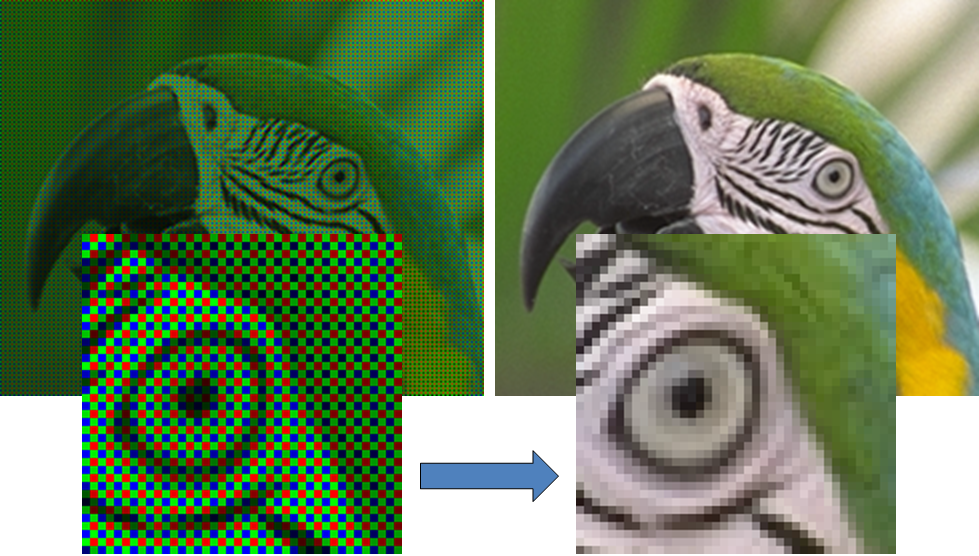
Polarization Demosaicking
ICIP2026, ICIP2025, ICIP2022,
IEEE Sensors J.2021, ICIP2020
Joint 2D-3D Segmentation and Association
ICPR2026
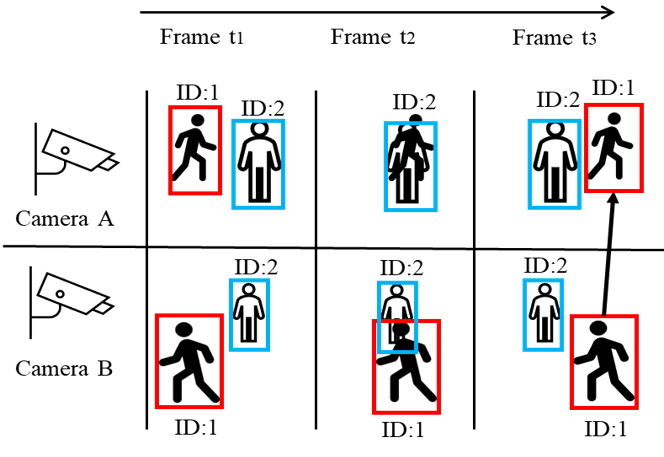
Multi-Camera Multi-Object Tracking
ICPR2026
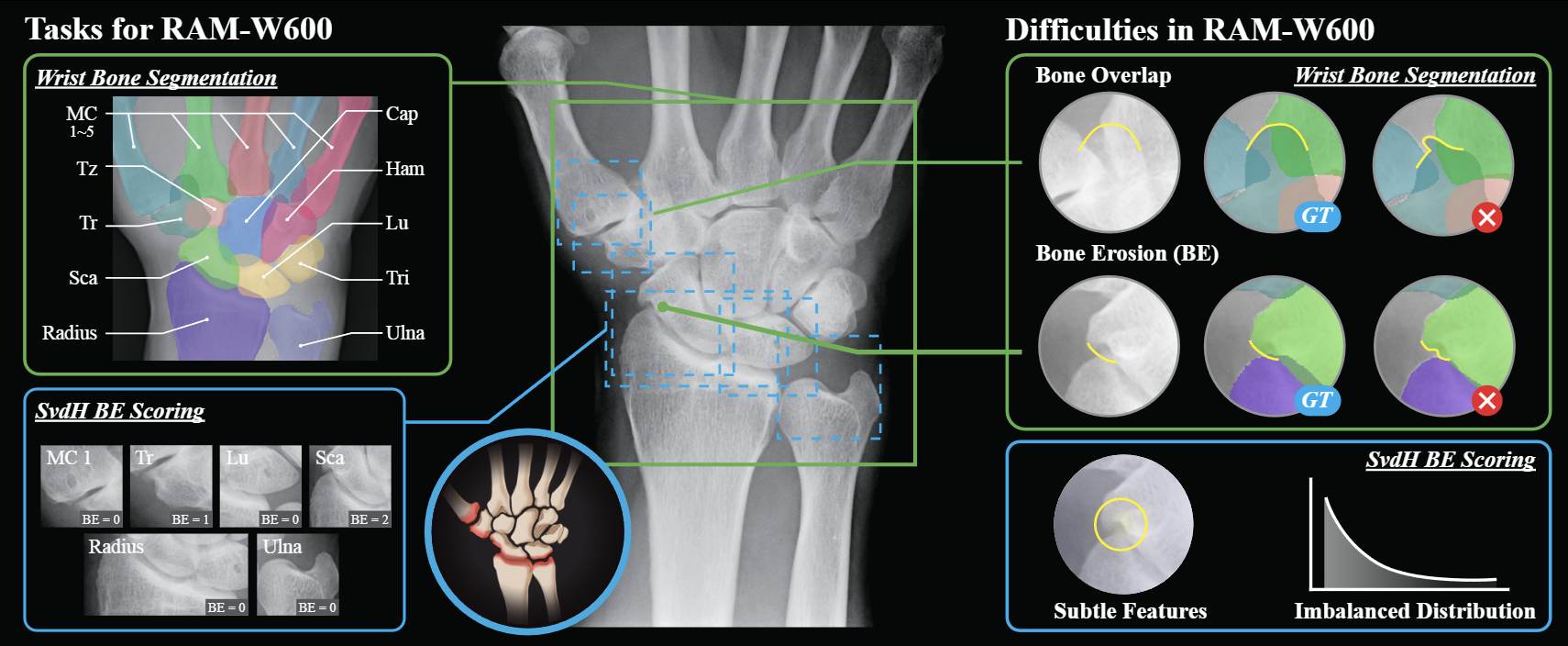
Computer-Aided Diagnosis for Hand Rheumatoid Arthritis
EMBC2026, BIBM2025, NeurIPS2025
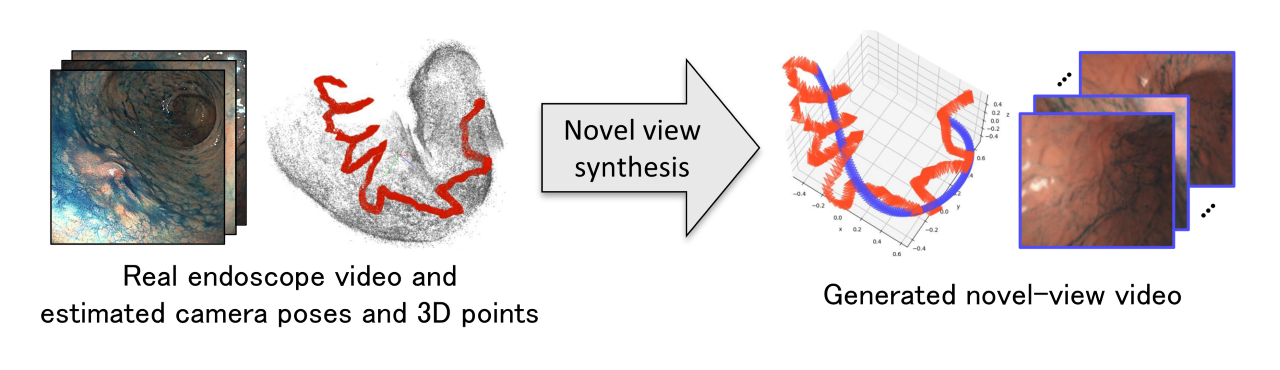
Novel View Synthesis for Endoscopy
EMBC2026, EMBC2024
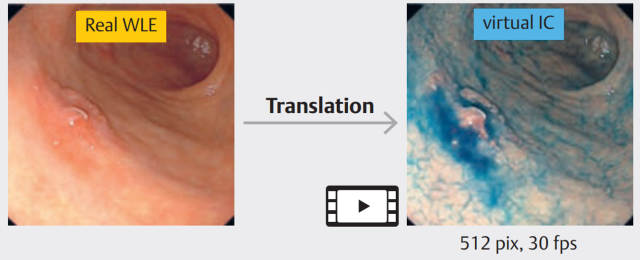
Virtual Chromoendoscopy
EMBC2026, Endoscopy 2026, Endosc. Int. Open 2026, Gastric Cancer 2024
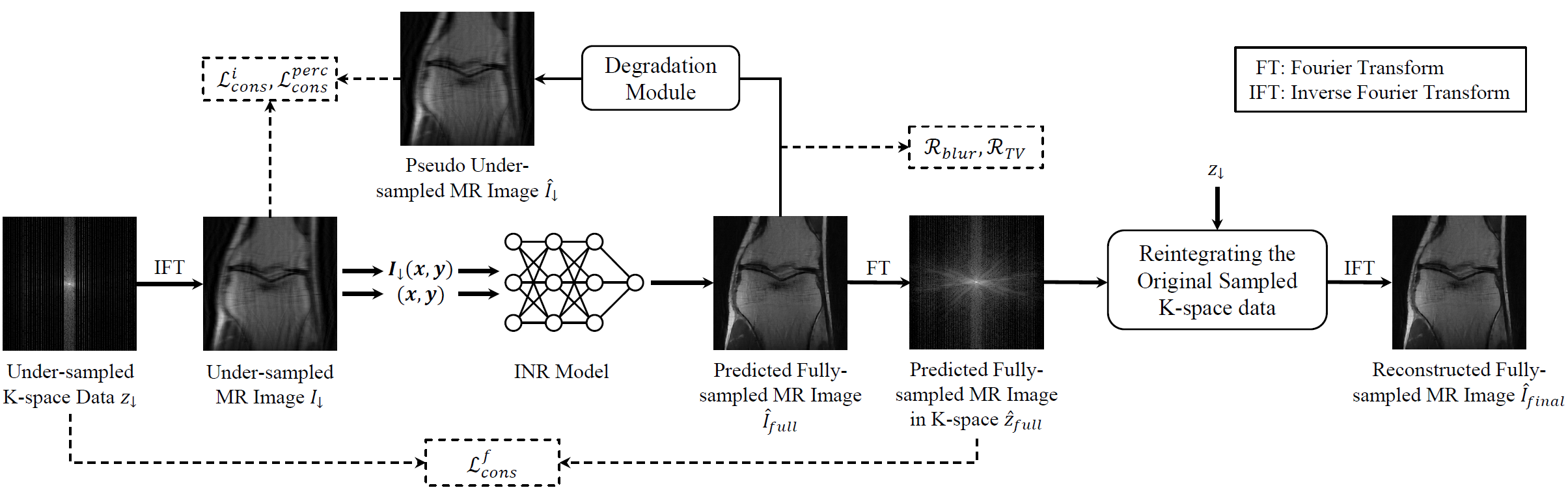
Scan-specific Self-supervised MRI Reconstruction Based on Implicit Neural Representations
BSPC2025, EMBC2024
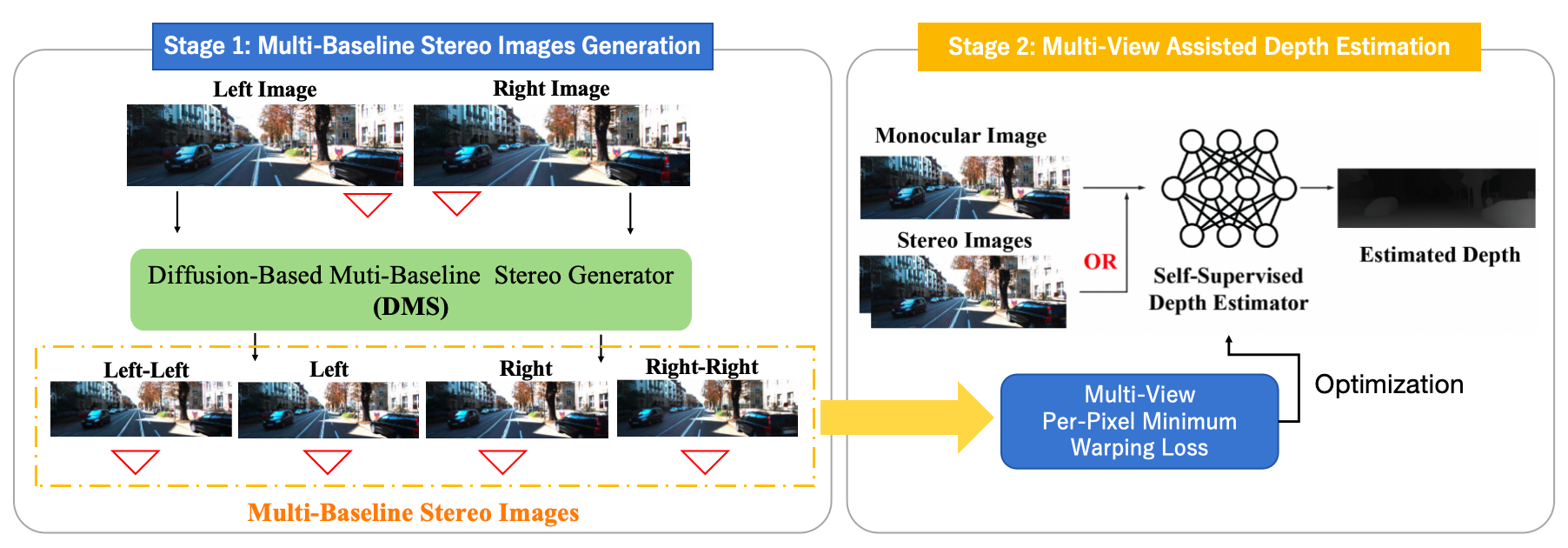
Diffusion-Based Multi-Baseline Stereo Generation for Improving Self-Supervised Depth Estimation
AIM (ICCVW2025)
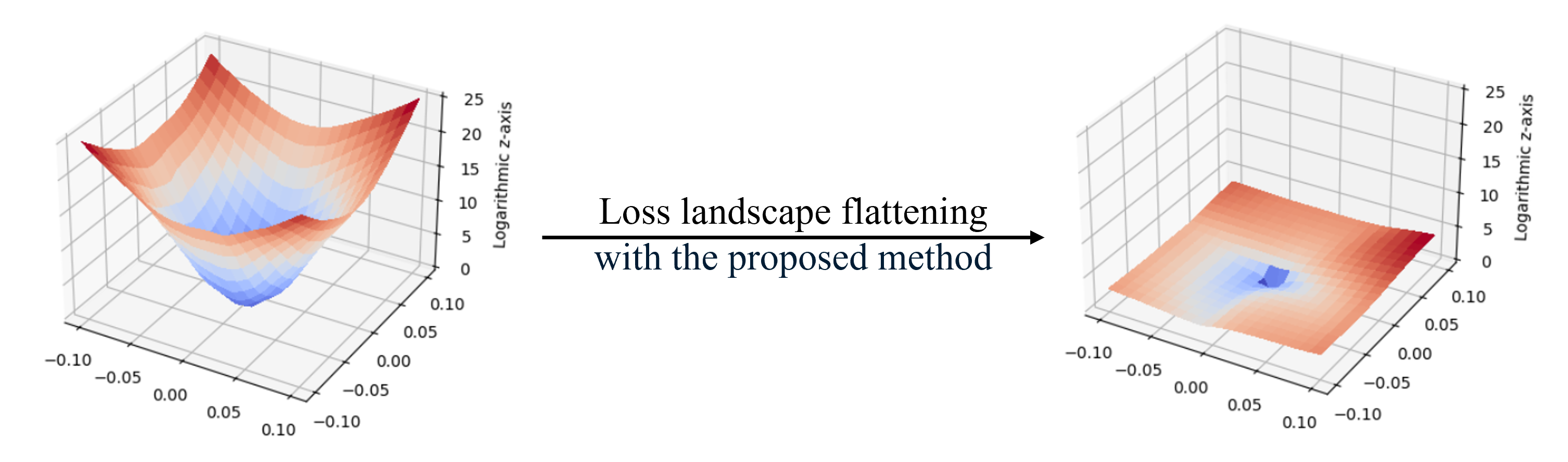
Multi-class Smoothed Hinge Loss Function in Pre-training for Transfer Learning
ICIP2025
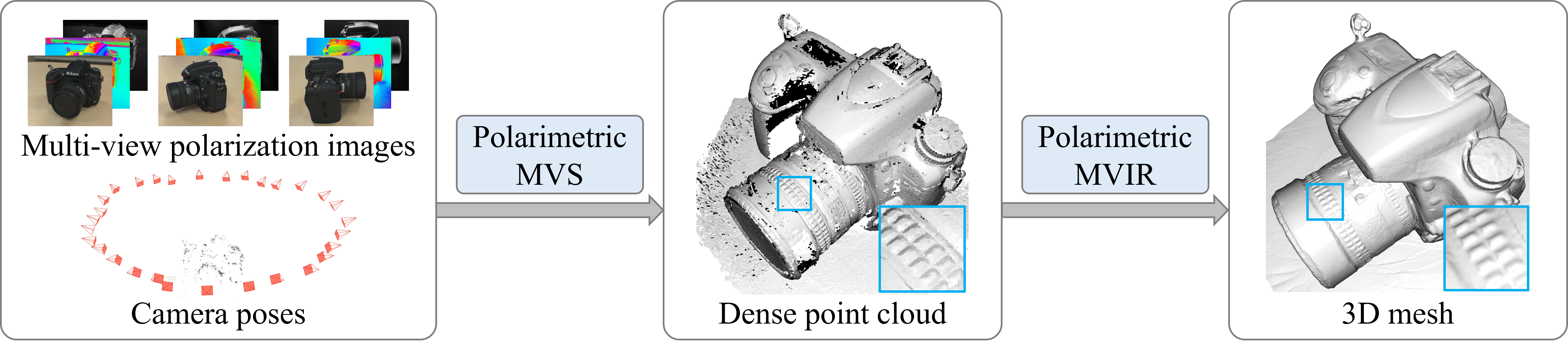
Polarimetric Multi-View 3D Reconstruction
MVA2025, WACV2024, TPAMI2023, ECCV2020
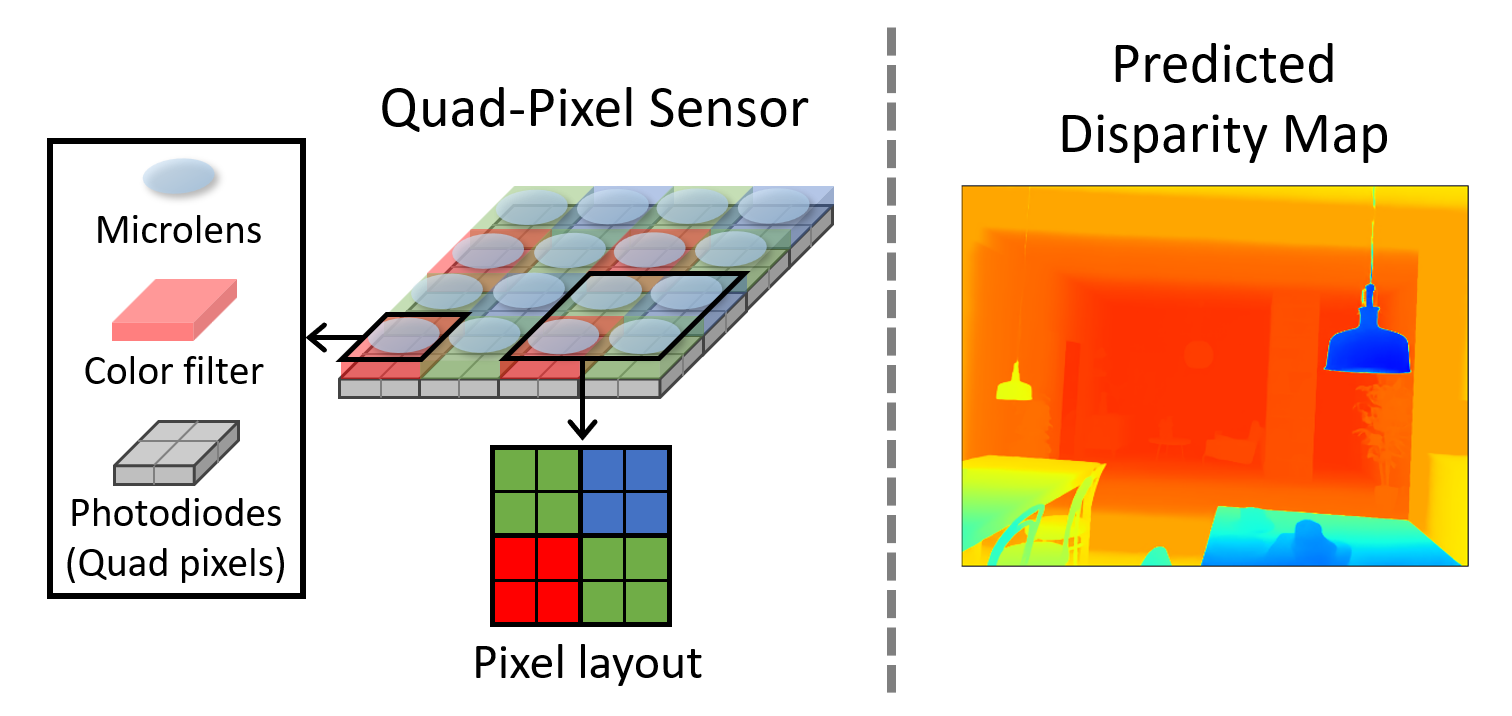
Disparity Estimation Using a Dual/Quad-Pixel Sensor
MVA2025, BMVC2024
Temporally-Consistent Diffusion Model for All-in-One Real-World Video Restoration
MMM2025
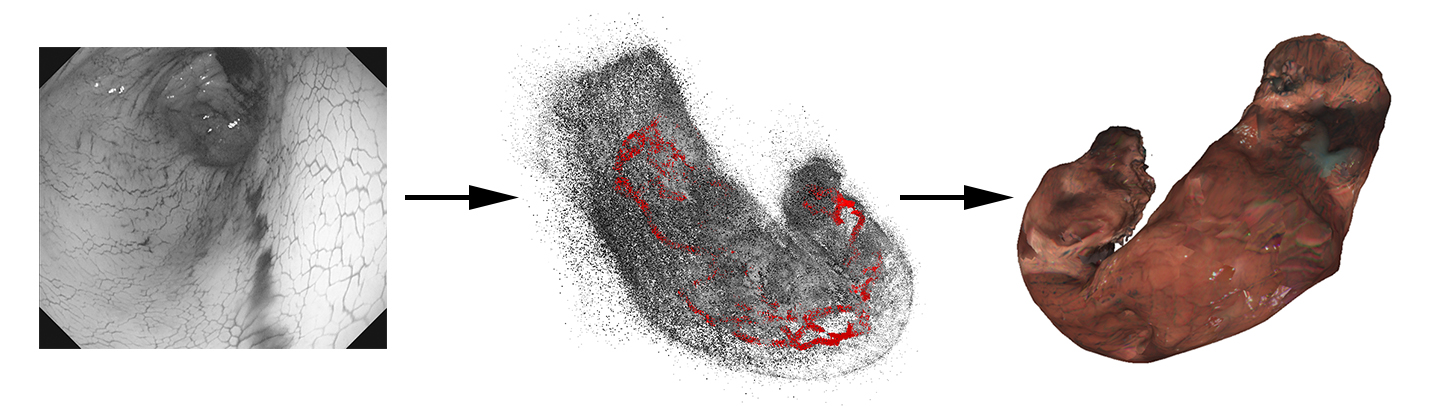
Stomach 3D Reconstruction from Endoscope Images
EMBC2024, EMBC2021, SPIE-MI2021, JTEHM2021, EMBC2020, EMBC2019, JTEHM2019
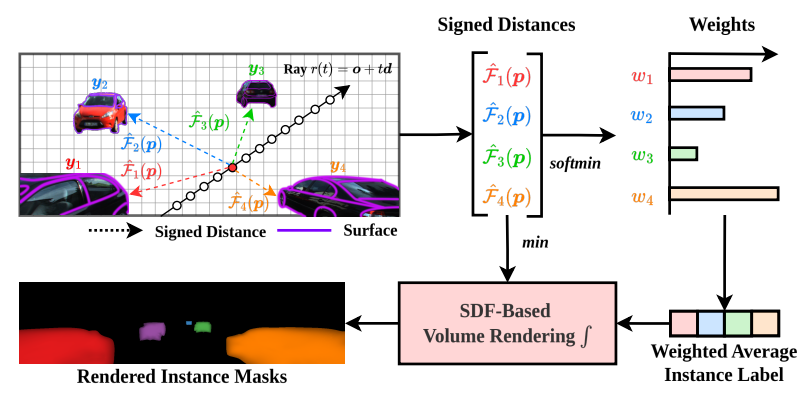
VSRD: Instance-Aware Volumetric Silhouette Rendering for Weakly Supervised 3D Object Detection
CVPR2024
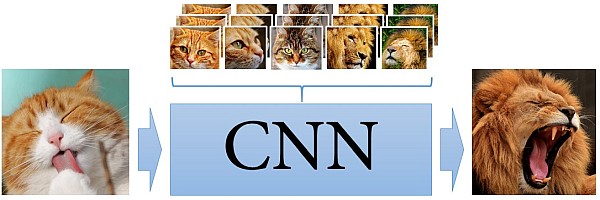
CNN-Based Degraded Image Recognition
CVPR2024 Workshop, ICCE2023, WACV2023, IEEE Access2021, TCSVT2020, ICIP2020, EI2020
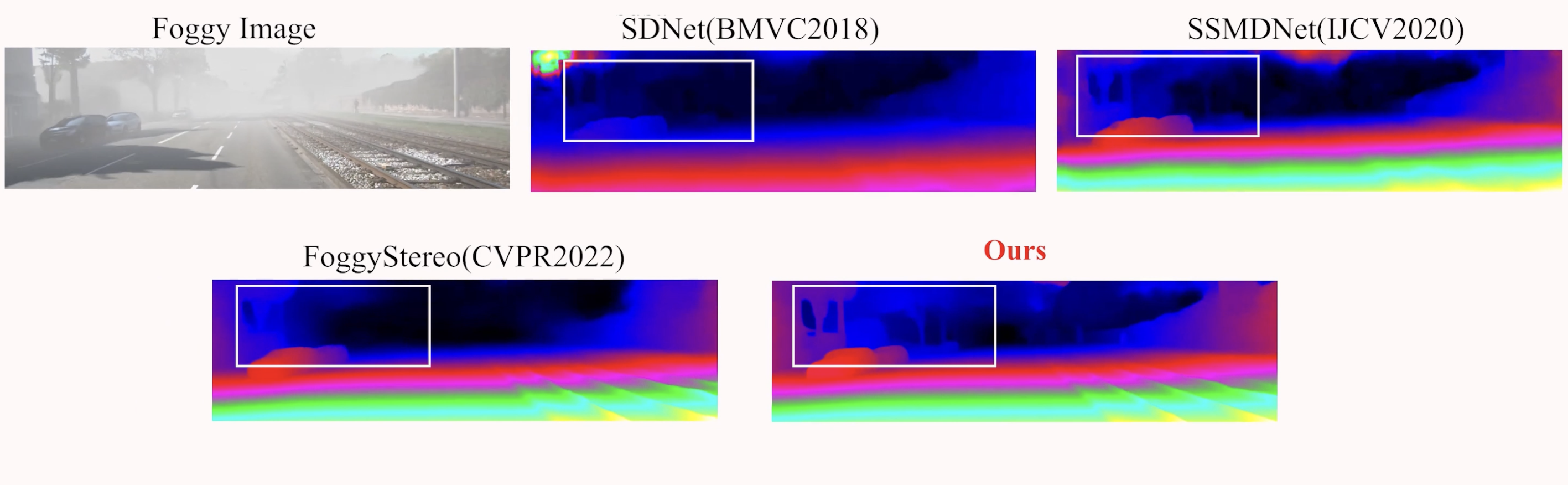
Generalizable Stereo Matching Network for Foggy Conditions
ICRA2024
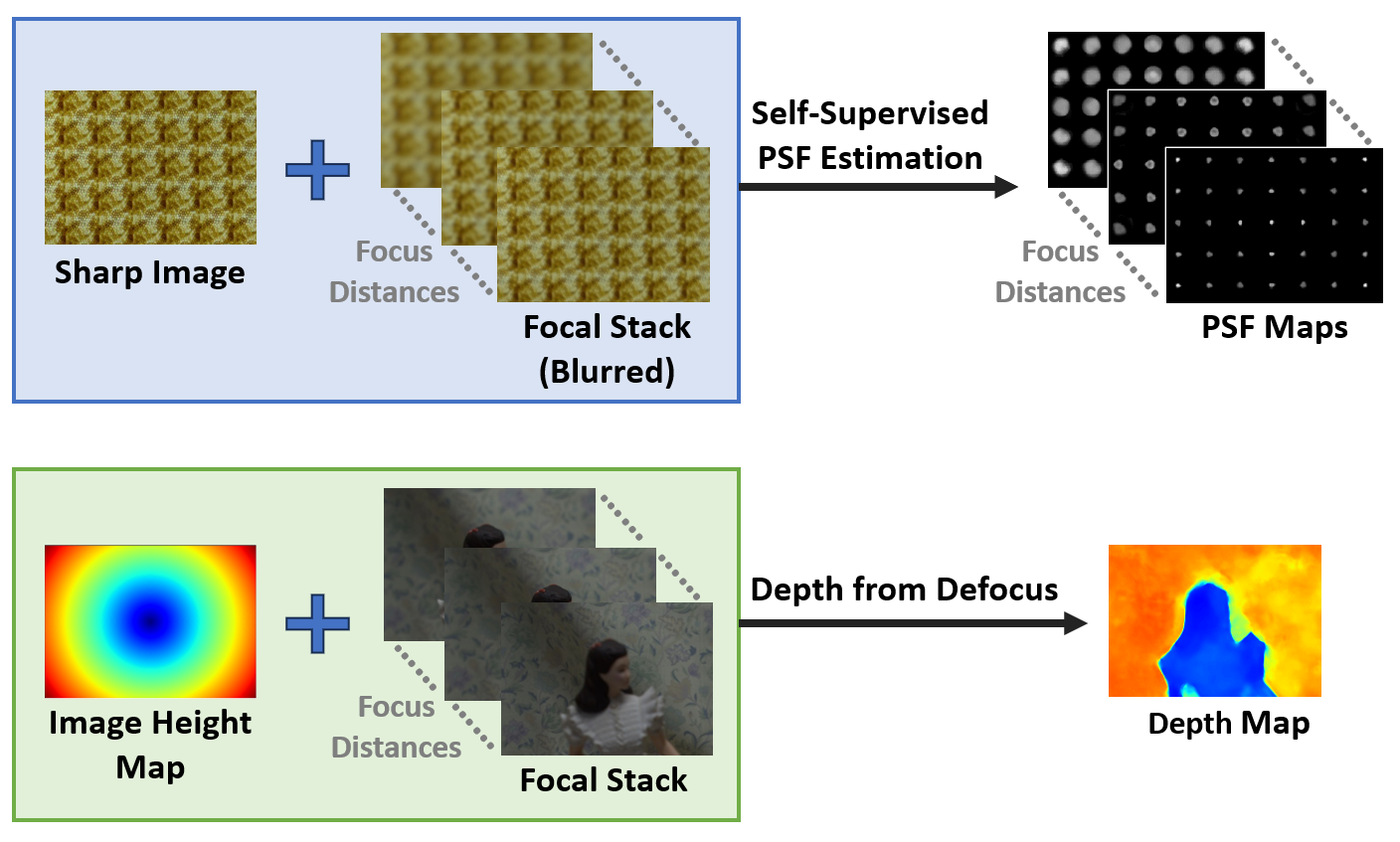
Aberration-Aware Depth-from-Defocus
ICASSP2024, IECON2022
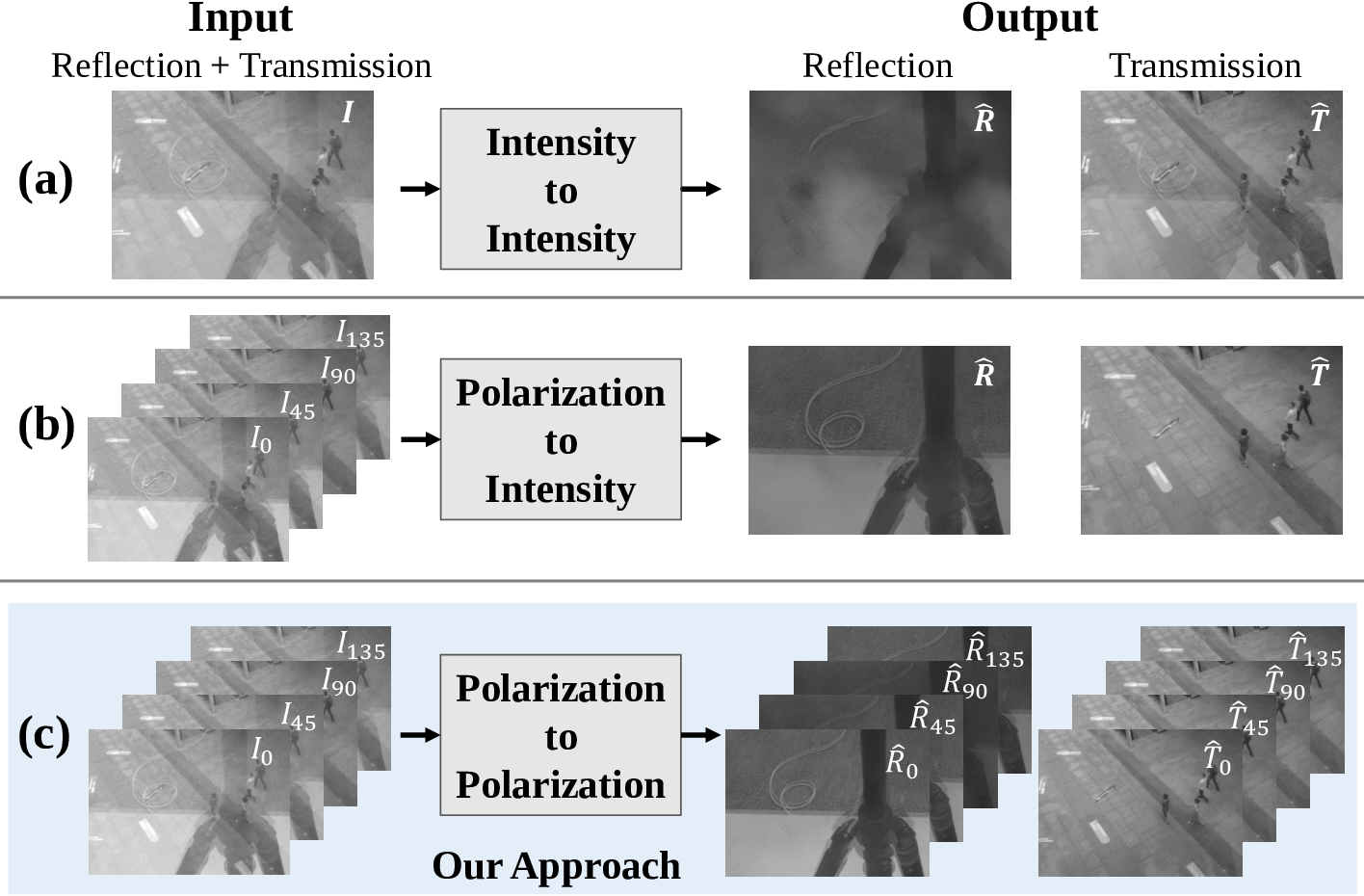
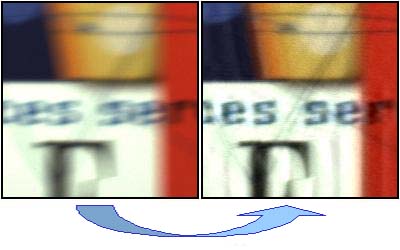
Reflection Removal Network Using Polarization
ICASSP2024
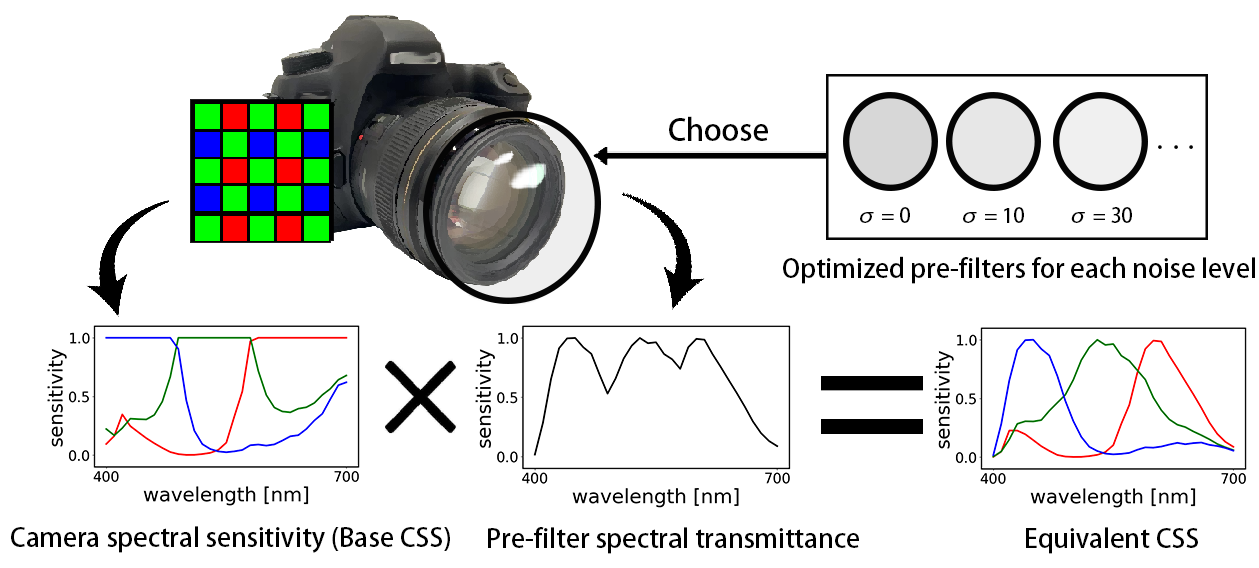
Camera Spectral Sensitivity Design
EI2024, ICIP2022
Multi-Modal Pedestrian Detection with Misalignment
EI2024, JEI2023, MVA2021
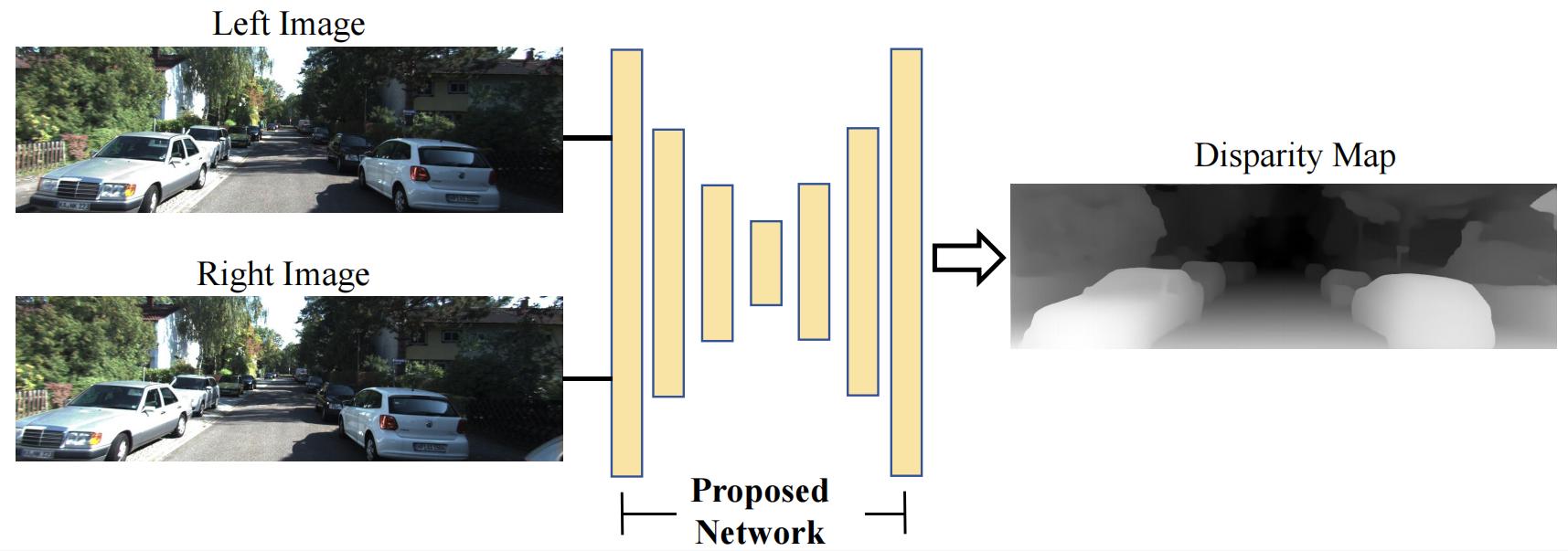
Deep Stereo Matching
WACV2024, ACMMM2022
Deep Learning (General Framework)
PSIVT2023, ACCV2022, ICPR2016, ICPR2014
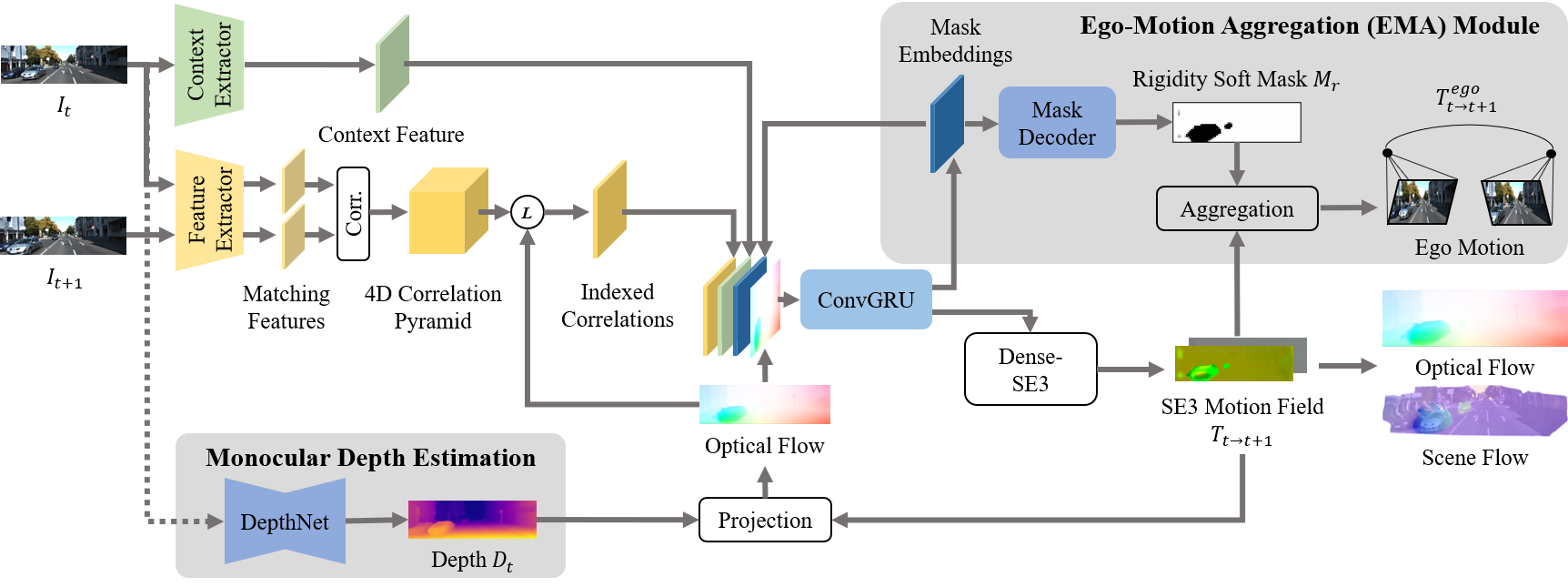
EMR-MSF: Self-Supervised Recurrent Monocular Scene Flow Exploiting Ego-Motion Rigidity
ICCV2023
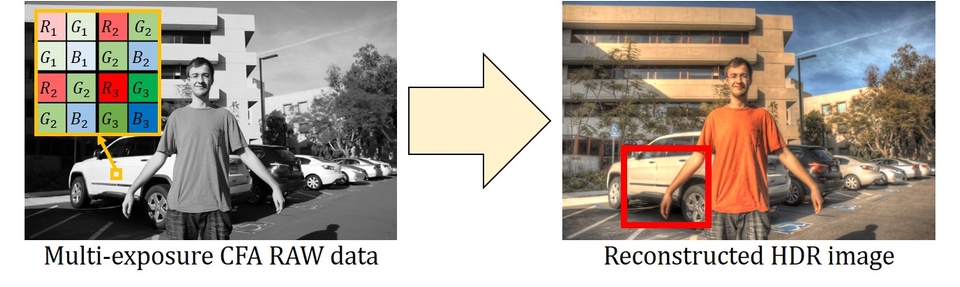
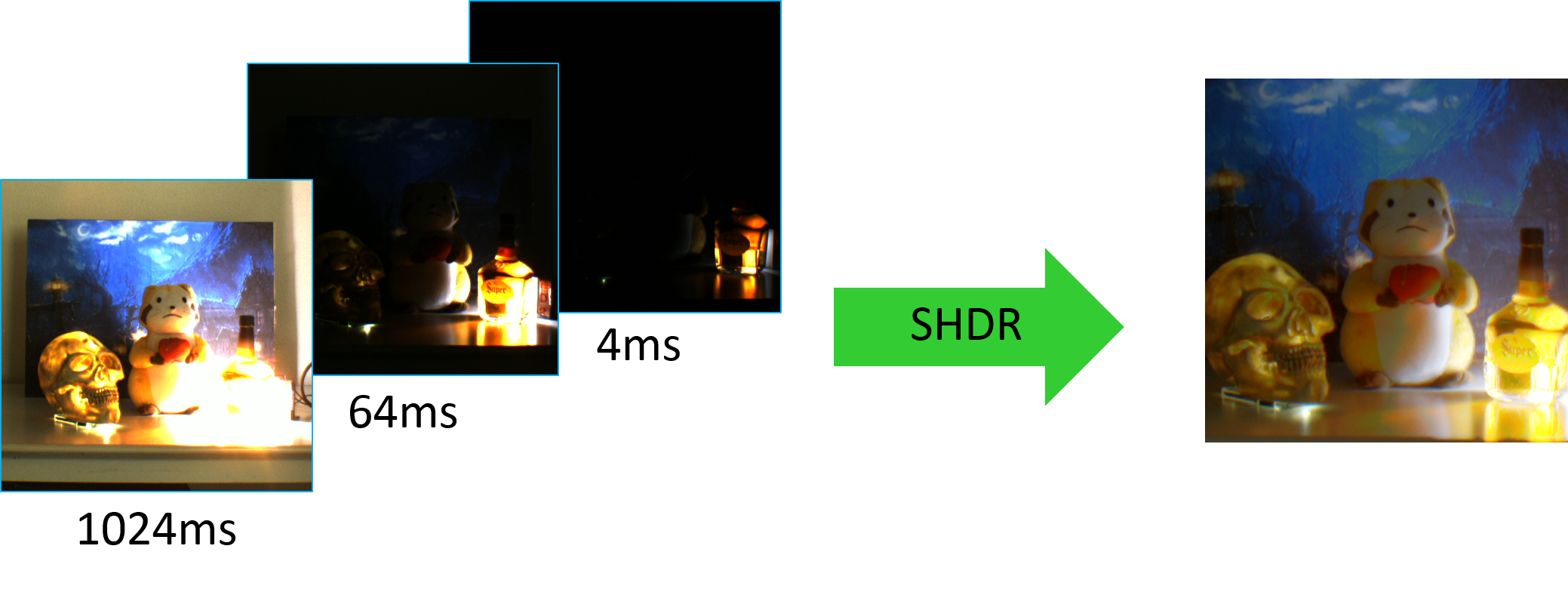
Deep Snapshot HDR Imaging
TVCJ2023, ACCV2020
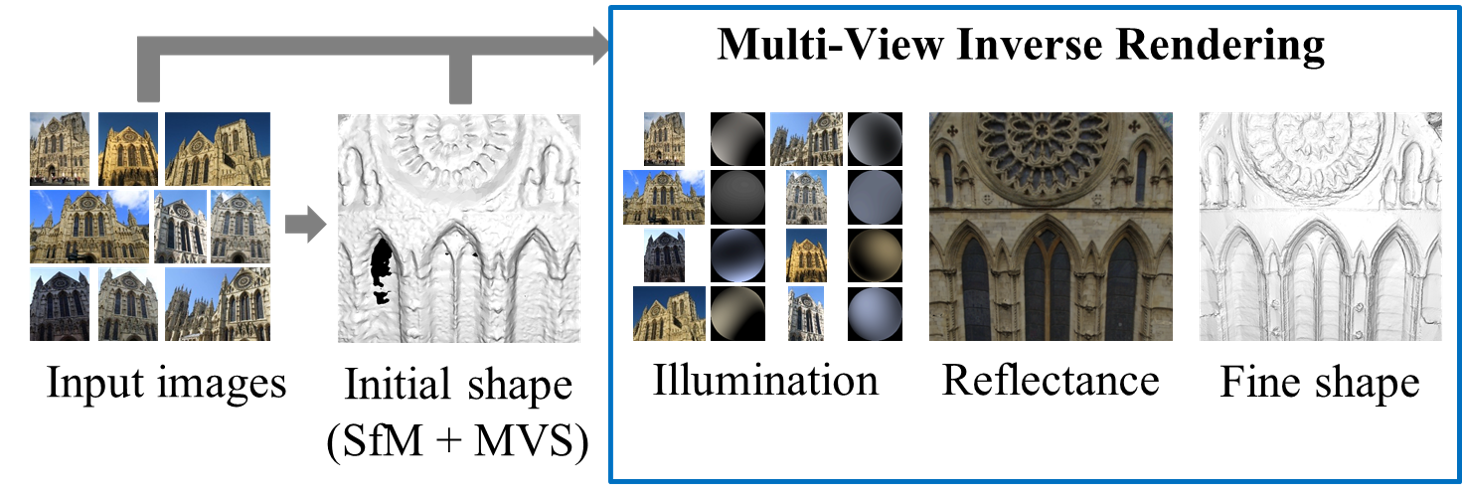
Multi-View Inverse Rendering
TPAMI2022, ICCP2021, ECCV2020, ECCV2016
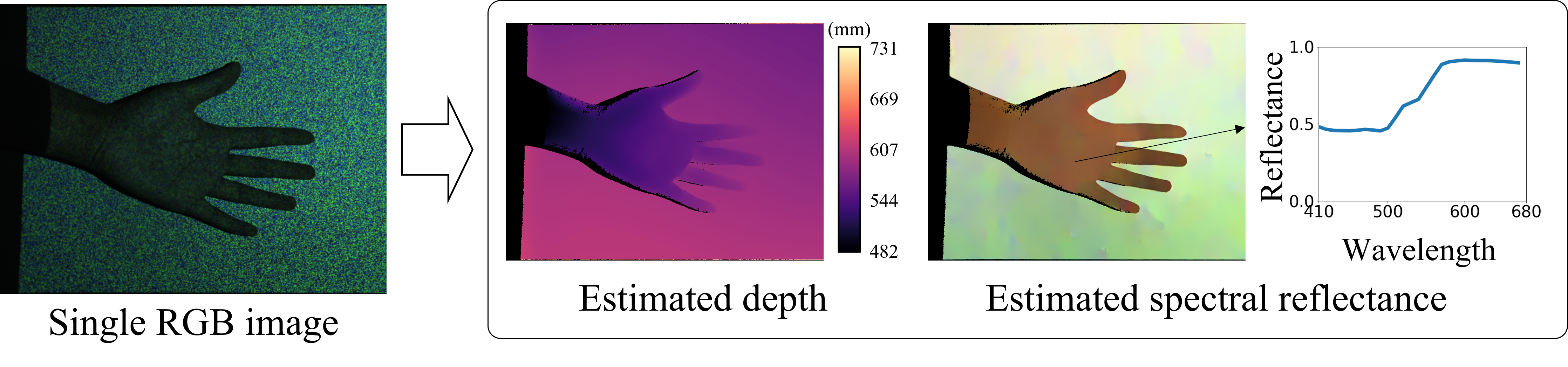
Deep Hyperspectral-Depth Reconstruction Using Single Color-Dot Projection
CVPR2022
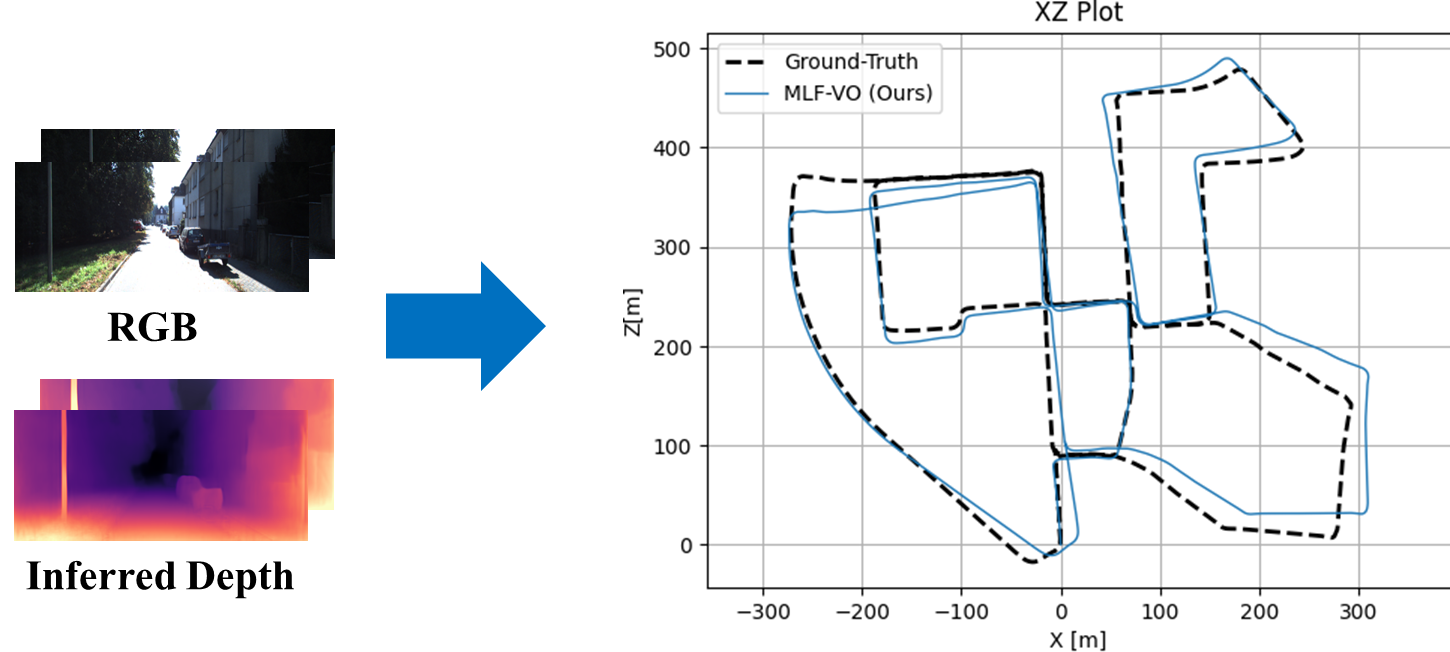
Self-Supervised Ego-Motion Estimation Based on Multi-Layer Fusion
ICRA2022
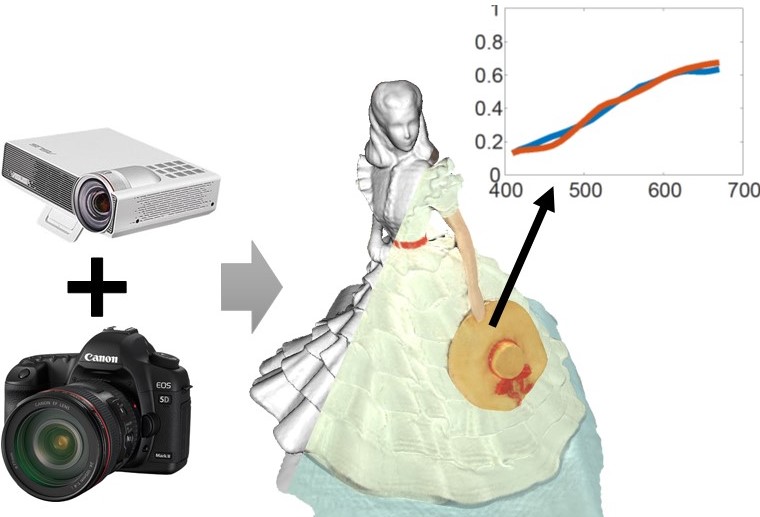
Precise Shape and Reflectance Estimation Using
Off-the-Shelf Projector and Camera
CVPR2022, CIC2020, ICCV2019, ICCE2018
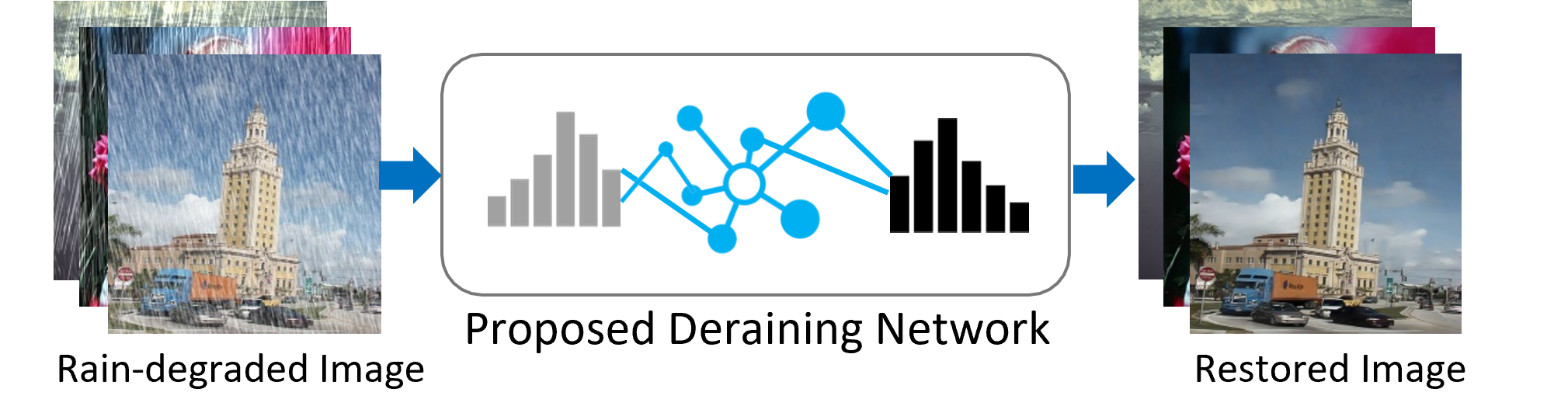
Single Image Deraining
BMVC2022, WACV2022
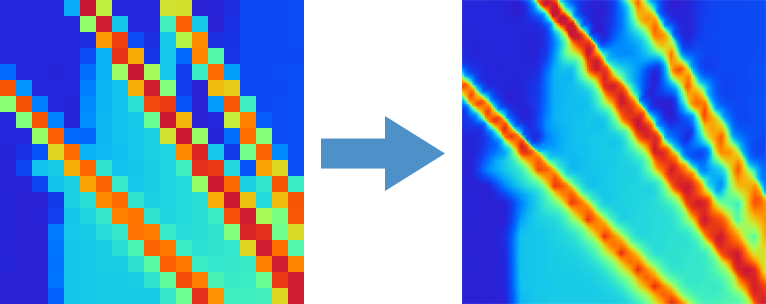
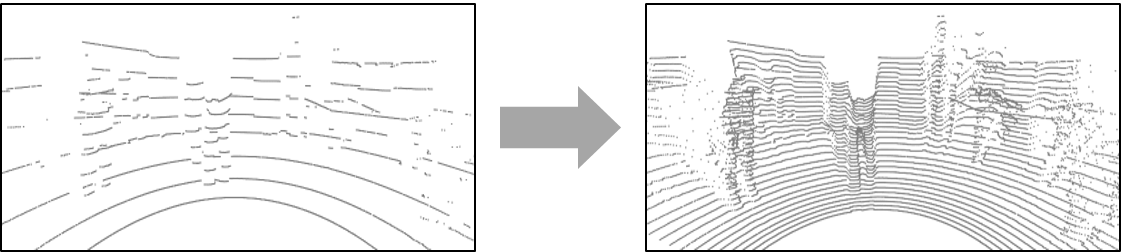
Depth Map and LiDAR Data Upsampling
IEEE Sensors J.2021, ICPR2016, ICAM 2015
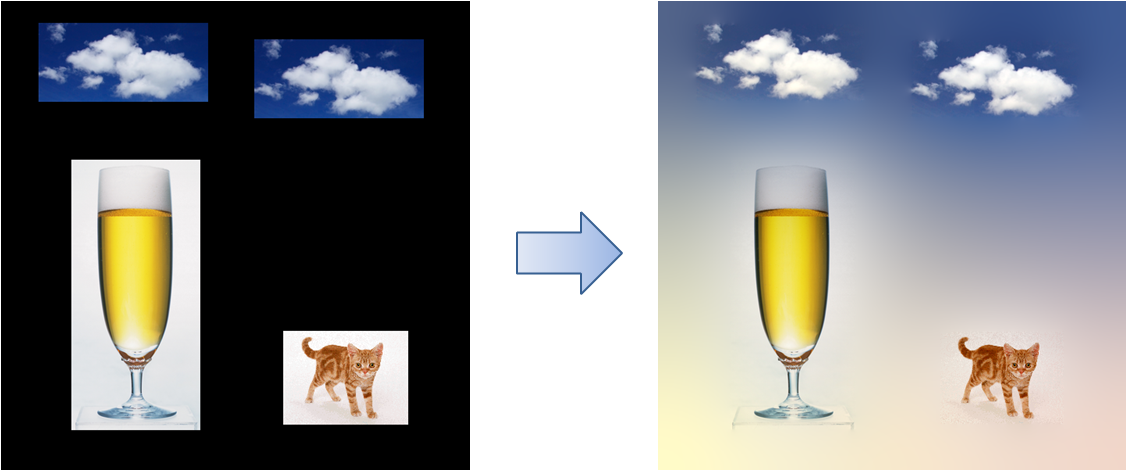
Gradient-Domain Image Reconstruction
JEI2021, ICCE2019, DCS2017, CVPR2016, SIGGRAPH Asia 2012
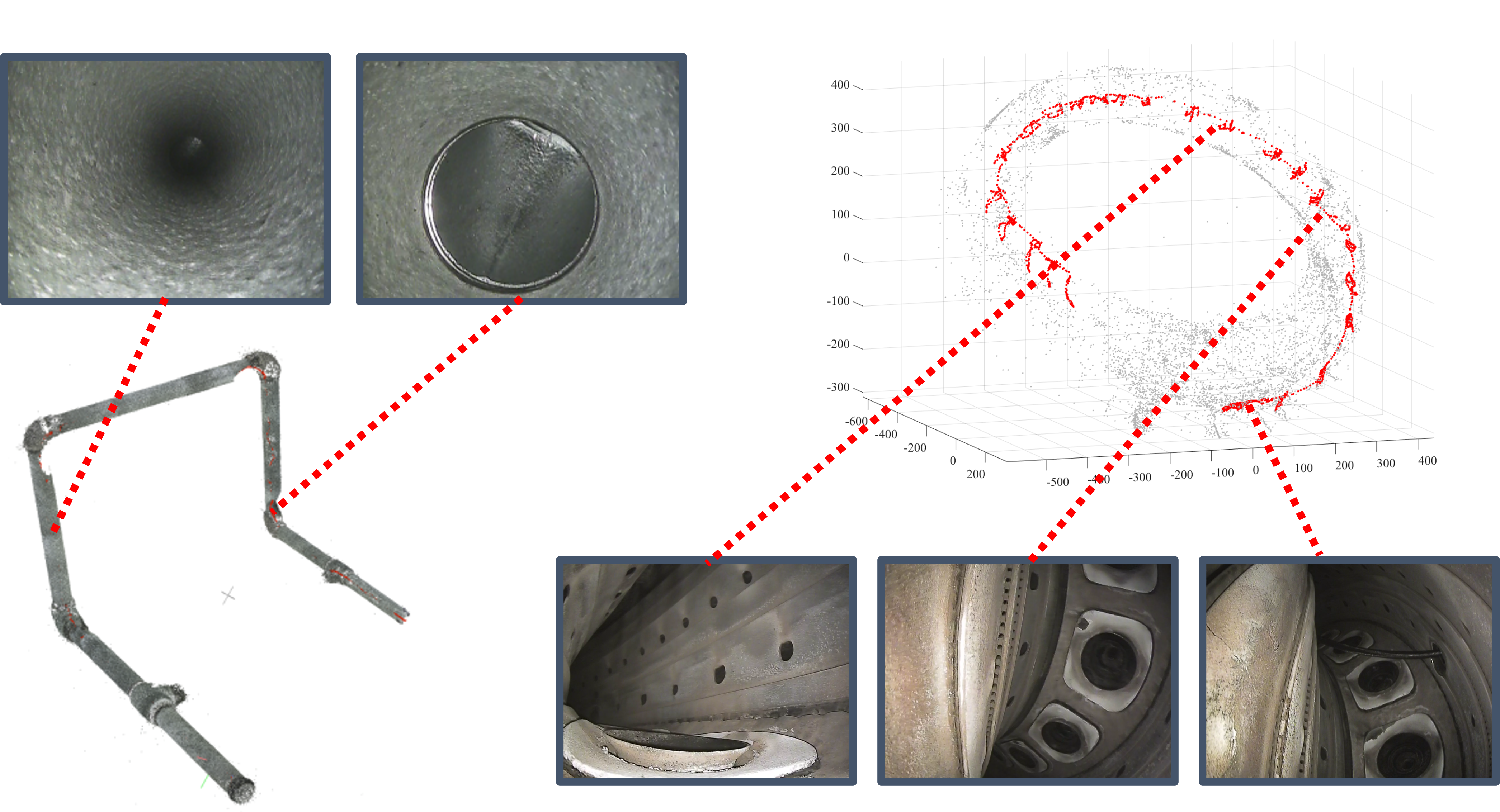
3D Reconstruction/Localization for Industrial Endoscope
ISIE2020
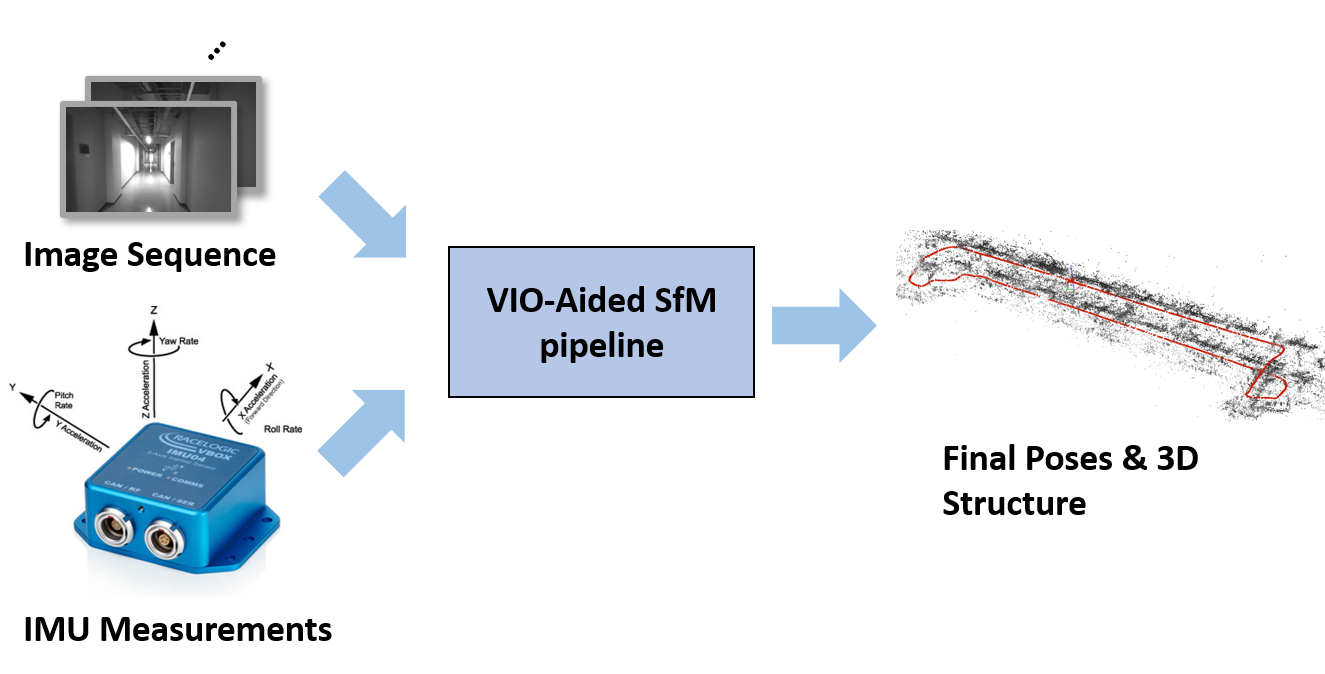
IMU-Aided 3D Reconstrcution
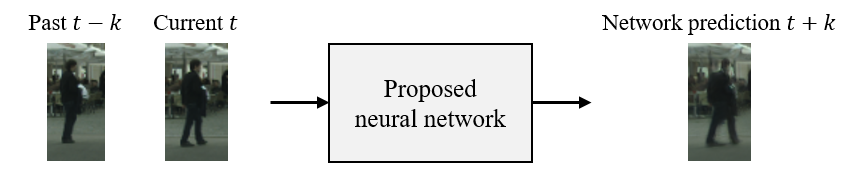
Future Frame Prediction
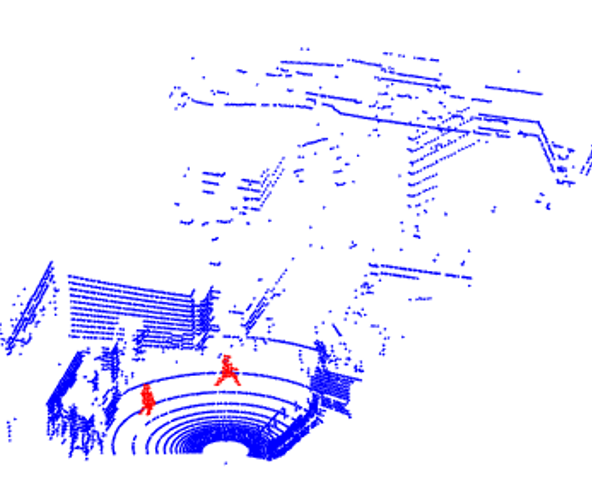
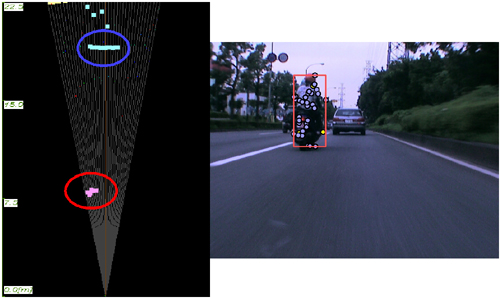
Learning-Based Human Detection from LiDAR Data
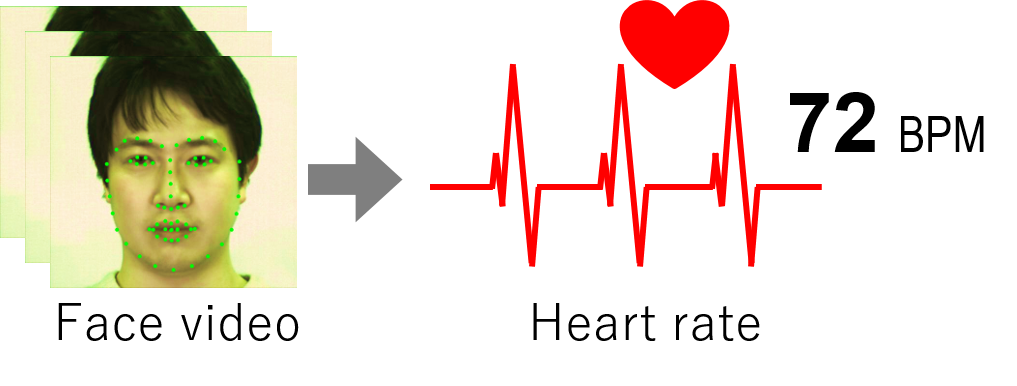
Vital Sensing
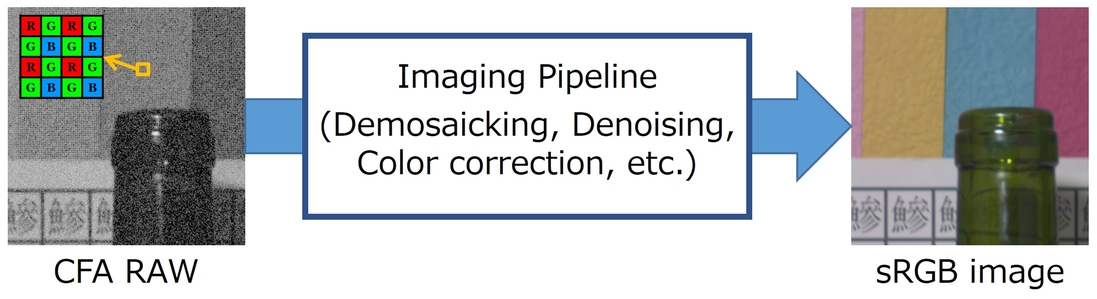
Unified Imaging Pipeline
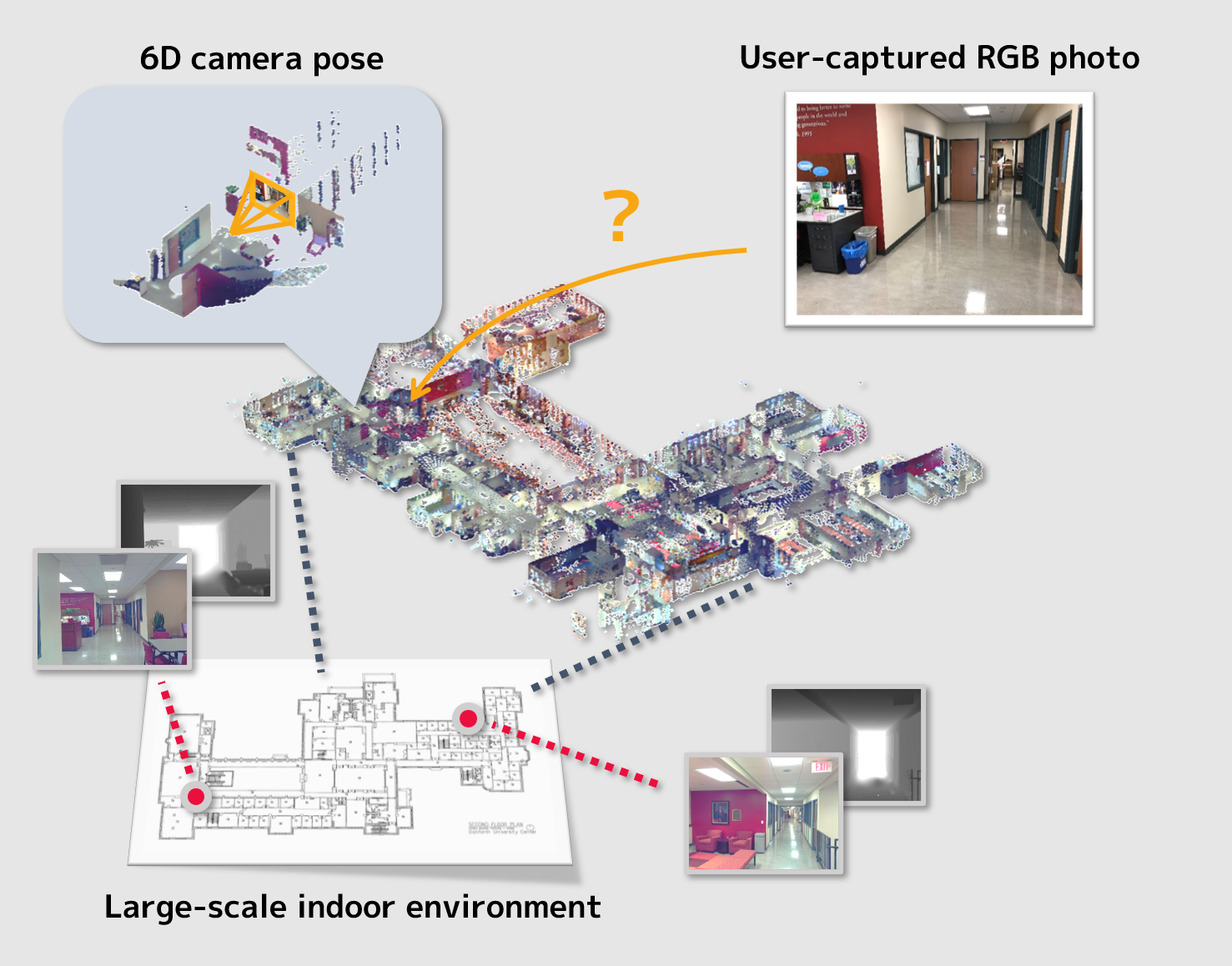
Large-Scale Visual Localization
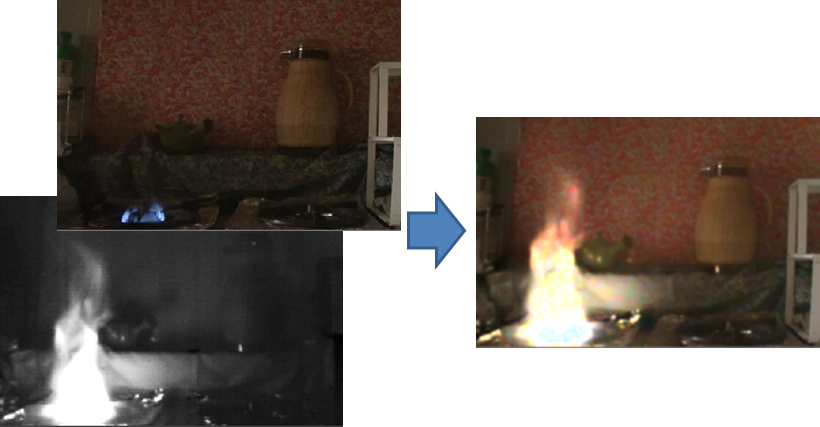
Multi-Modal/Spectral Image Fusion
Beyond RGB Imaging
CNN-Based Image Restoration
Residual Interpolation for Image Demosaicing
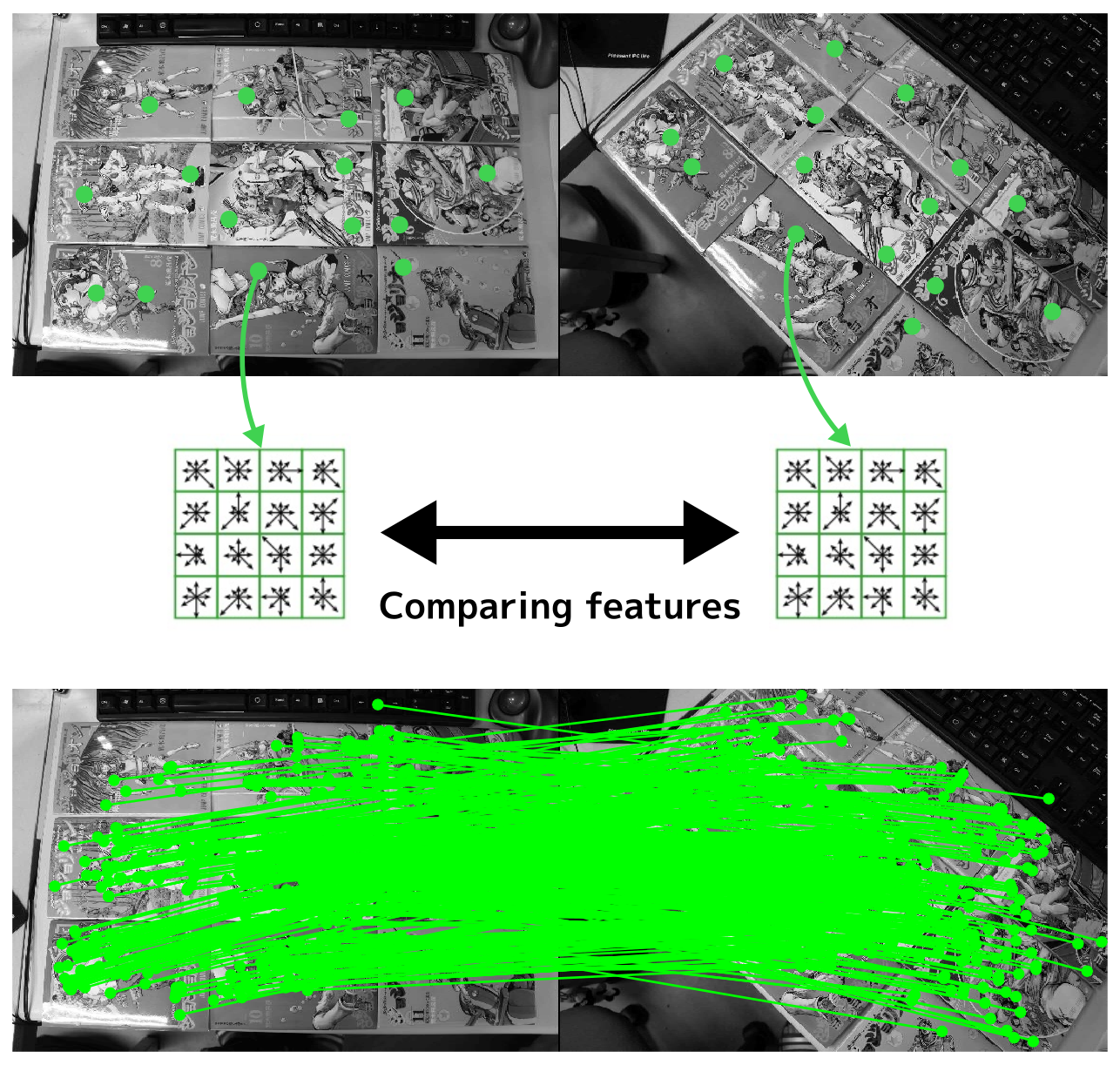
Robust Feature Matching
Super High Dynamic Range Imaging
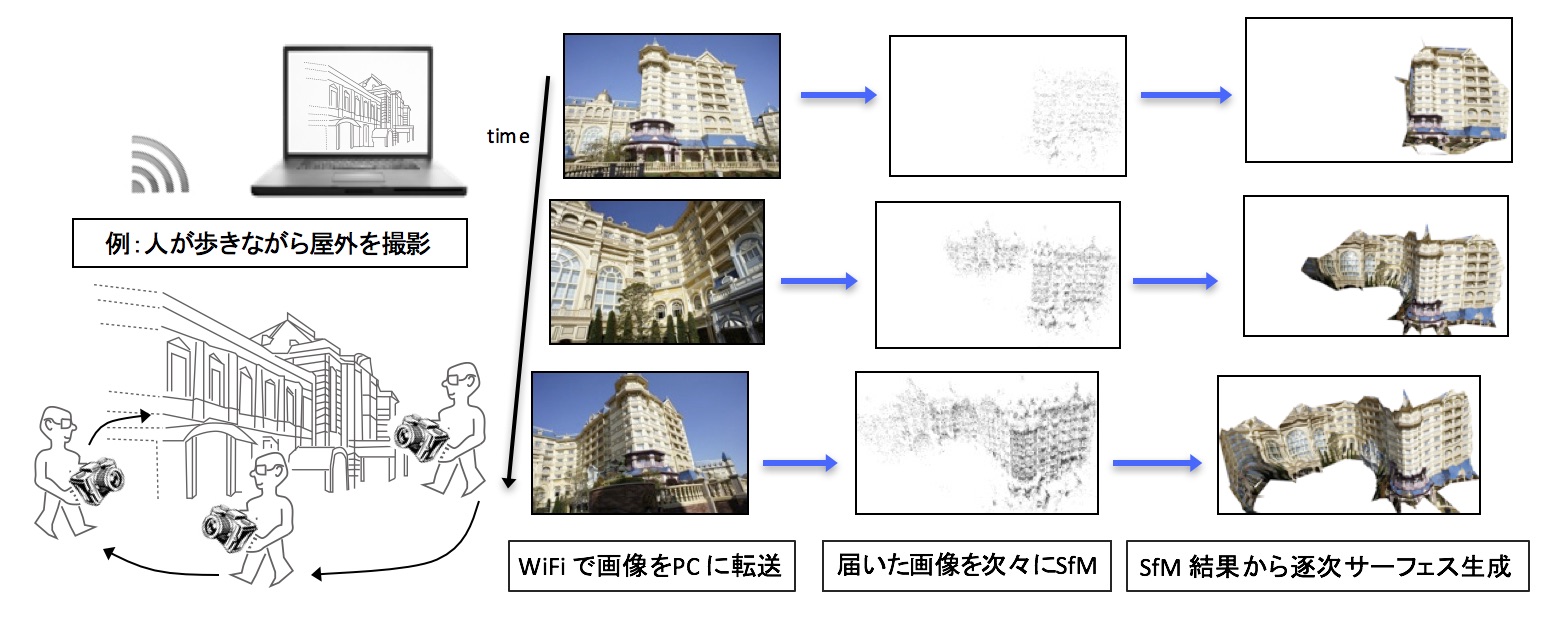
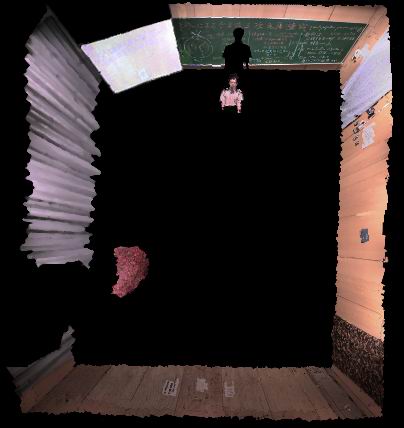
Online 3-D Reconstruction
Place Recognition
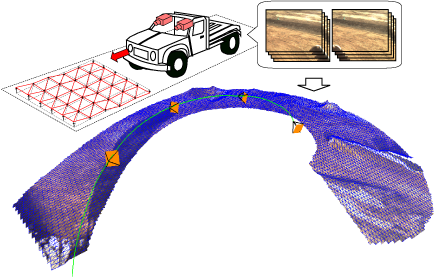
Ground Surface Estimation Using Vehicle-Mounted Cameras
Stereoscopic Image Generation
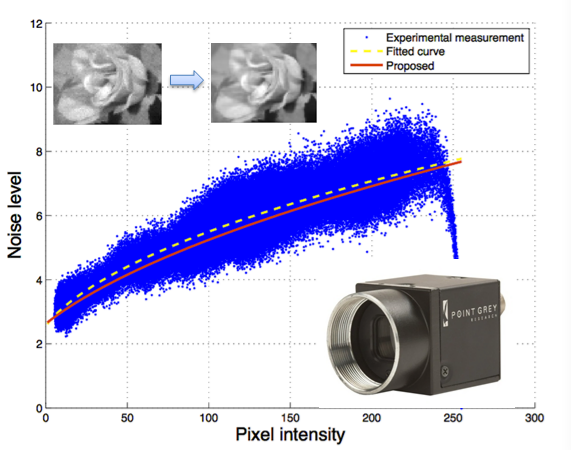
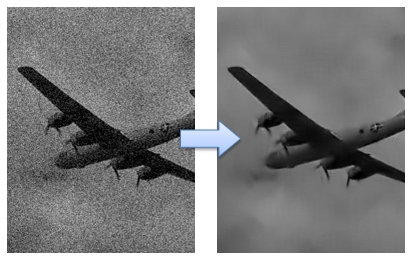
Signal-Dependent Noise Estimation and Removal
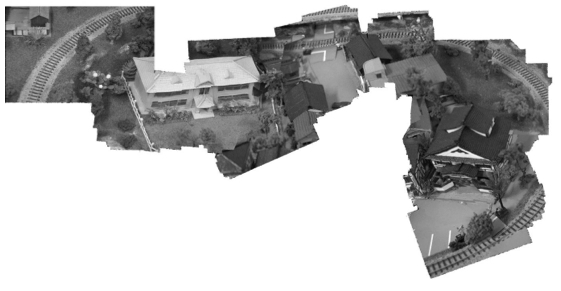
Online Video Mosaicing
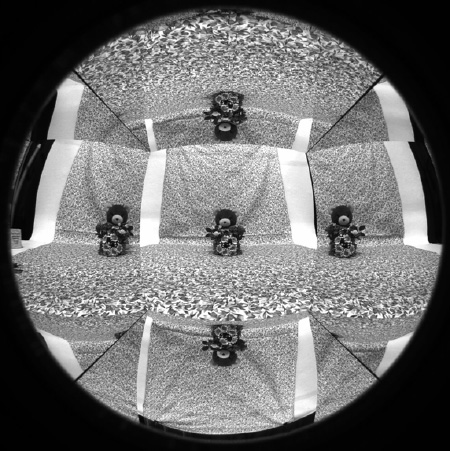
Multi-View Stereo with Fish-Eye Lens and Mirrors
Image Prior and Denoising
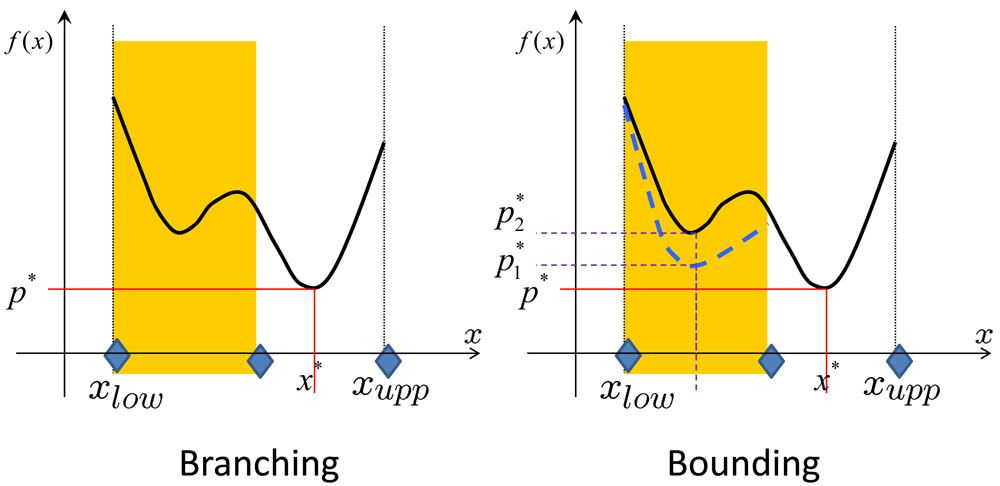
Global Optimizations
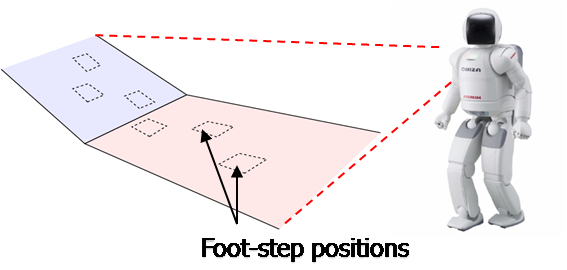
Floor Sensing for Biped Robot
Fast 3-D Reconstruction by Direct Stereo Image Alignment
Precise Motion Estimation by Direct Stereo Image Alignment
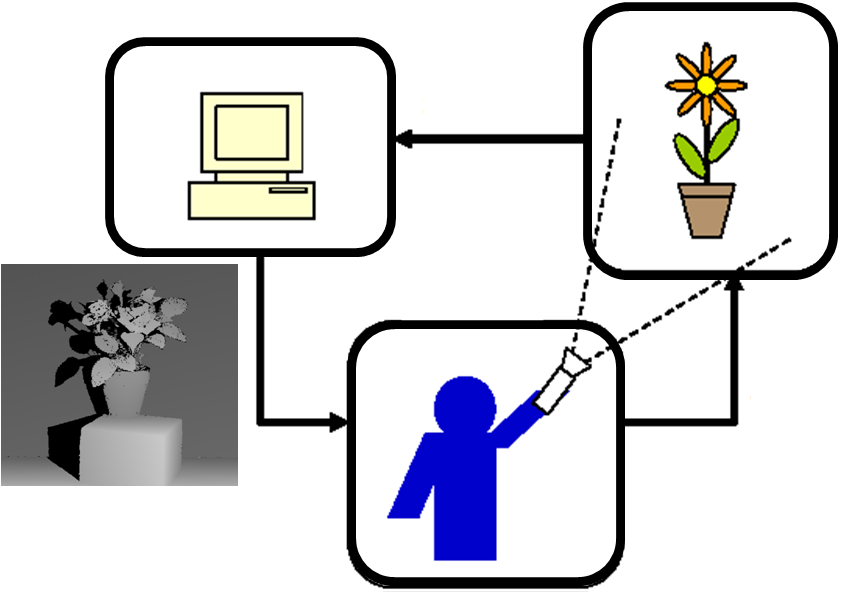
Projector-Camera Systems
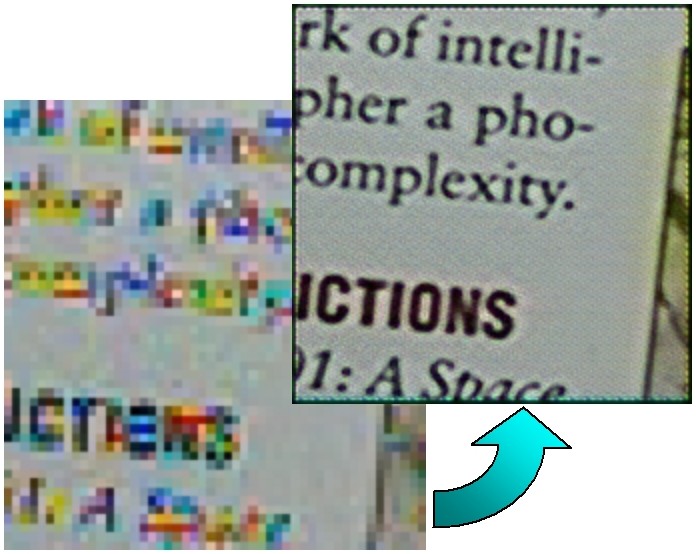
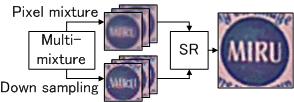
Super Resolution
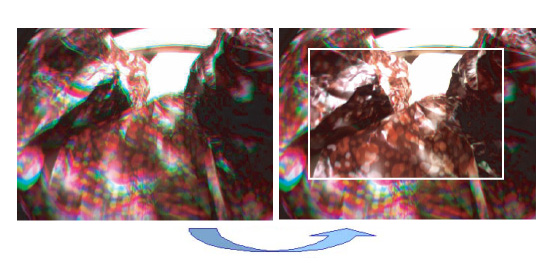
Non-Rigid Registration Between Color Channels
Motion Debluring
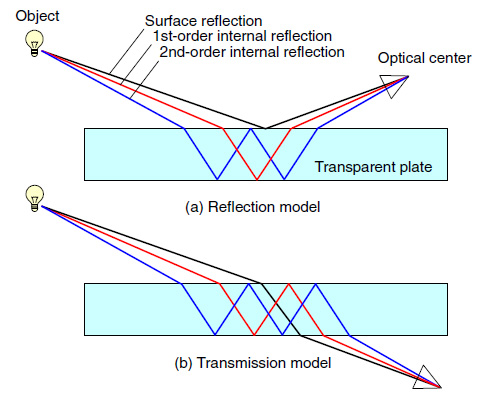
Reflection Stereo
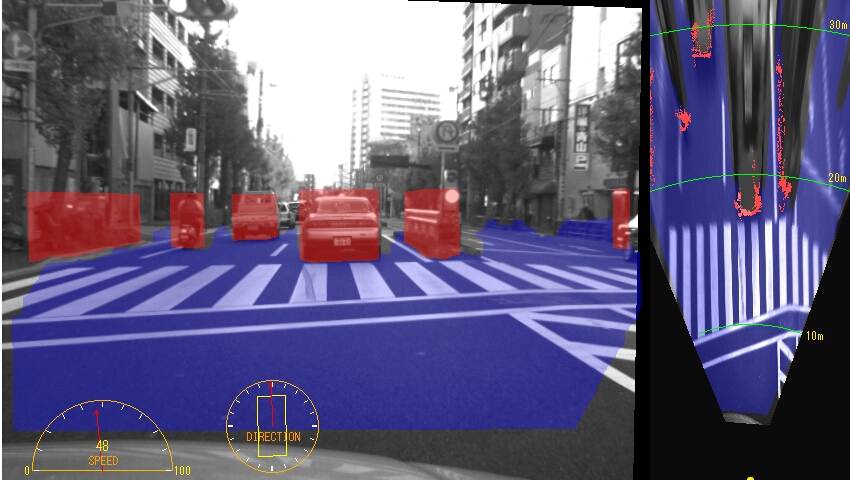
Road Scene Understanding
Virtual Focusing
Pixel Mixture
Face Detection
Unified Optimization of Stereo and Sequencial Images
Interactive Stereo 3-D Reconstruction
Multiperspective Panoramic 3-D Reconstruction
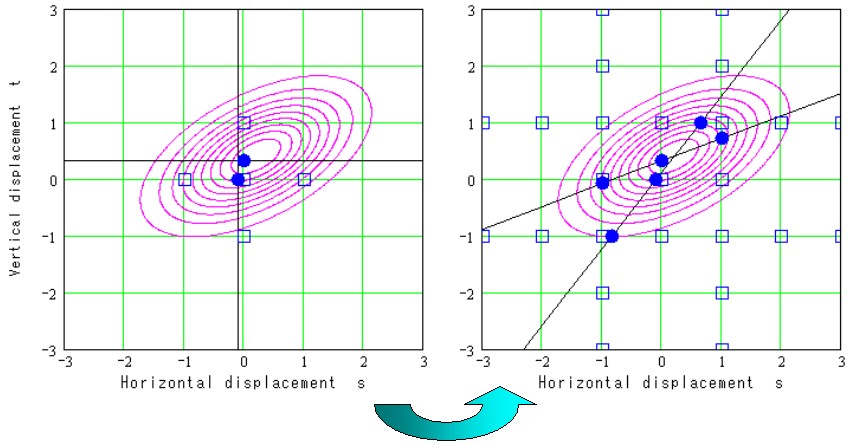
Precise Sub-Pixel Matching
Sensor Fusion of MMW Radar and CCD Camera
Precise Image Mosaicing
Multi-Baseline Stereo
and Related Stuff
Shape from Rotation
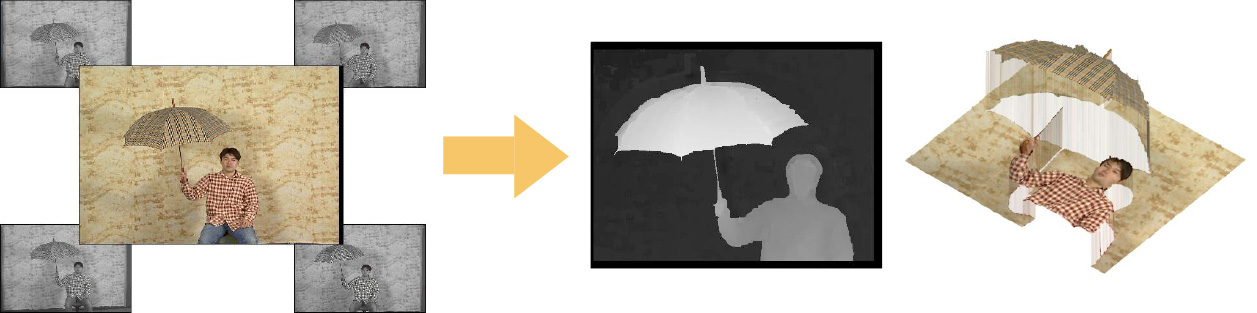
Multi-View Image-Based Rendering without 3-D Reconstruction
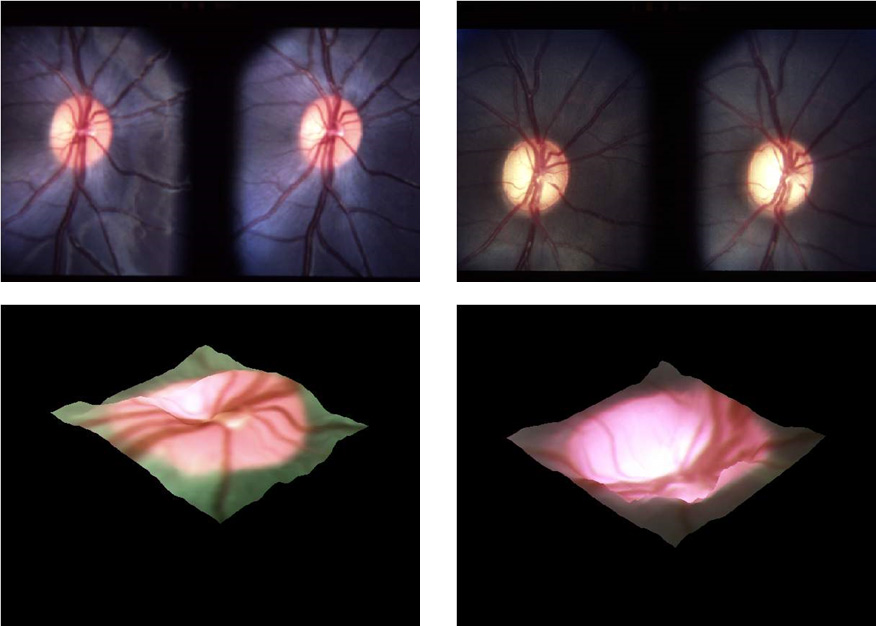
3-D Reconstruction of Optic Nerve Head
Stereo Matching with an Adaptive Window